For detailed theoretical foundations, mathematical proofs, and algorithm derivations, see Chapter 18: On-Device Learning and Model Adaptation in the PDF textbook.
The PDF chapter includes: - Complete mathematical foundations of transfer learning theory - Detailed analysis of catastrophic forgetting and continual learning - In-depth coverage of incremental learning algorithms - Comprehensive personalization strategies and user modeling - Theoretical foundations for on-device training optimization
Explain why deployed models on edge devices need continual adaptation
Apply transfer learning with frozen base layers and small trainable heads suitable for edge hardware
Implement incremental learning strategies that reduce catastrophic forgetting (replay buffers, regularisation such as EWC)
Design simple personalization workflows where users provide on-device examples and models adapt safely
Theory Summary
Why Models Drift
When you deploy an ML model, the real world immediately starts to differ from your training data. Four types of distribution shift require on-device adaptation:
Data drift: Input distribution changes (seasons, user behavior trends, sensor calibration)
Concept drift: The relationship between inputs and outputs changes (new fraud patterns, evolving spam)
Personalization: Each user has unique patterns the general model misses (typing style, pronunciation)
Without adaptation, deployed models degrade silently. Accuracy that was 95% on the test set becomes 70% within weeks in production.
Transfer Learning for Resource-Constrained Devices
Full retraining on edge devices is impractical (limited memory, slow CPUs, battery constraints). Transfer learning solves this by freezing the feature extraction layers and training only the final classifier head.
Why it works: - Early layers learn general features (edges, textures, basic patterns)—these remain useful across tasks - Late layers learn task-specific patterns—only these need updating - Freezing 90%+ of parameters reduces trainable weights from millions to thousands
This fits on ESP32 (520 KB SRAM) with careful optimization.
Catastrophic Forgetting: The Hidden Danger
Neural networks overwrite old knowledge when learning new patterns. Catastrophic forgetting occurs when on-device training on new data causes the model to forget previously learned tasks.
Classic example: - Model trained on digits 0-9, achieves 95% accuracy - User provides 50 examples of a new gesture - After on-device training, new gesture accuracy: 98% - But original digit accuracy drops to 40%!
Two primary solutions:
Experience Replay: Maintain a small buffer (100-500 samples) of old data. When training on new data, mix in replay samples. This “reminds” the model of old tasks while learning new ones.
Elastic Weight Consolidation (EWC): Compute importance weights (Fisher information) for each parameter based on old tasks. During new training, penalize changes to important weights. No replay buffer needed—better for memory-constrained devices.
Key Concepts at a Glance
Core Concepts
Transfer Learning: Freeze base layers, train only classifier head (99% parameter reduction)
Catastrophic Forgetting: Neural networks overwrite old knowledge when learning new tasks
Replay Buffer: Store 100-500 old examples; mix with new data during training to prevent forgetting
Fisher Information: Measures parameter importance; used by EWC to protect critical weights
Personalization: Adapt general model to user-specific data (50-100 examples sufficient)
Version Control: Save model checkpoints before/after adaptation with automatic rollback on regression
Drift Detection: Monitor prediction confidence or feature statistics to trigger retraining
Common Pitfalls
Mistakes to Avoid
Catastrophic Forgetting Without Replay
The most insidious bug. Your model improves on new data but silently forgets old knowledge. Users report “the old stuff doesn’t work anymore.” Prevention: Always use a replay buffer mixing old and new data, or use EWC. Test on all classes after adaptation, not just new ones.
Not Checking Architecture Consistency
Freezing layers incorrectly (e.g., layer.trainable = False after compiling) has no effect. Always freeze before calling model.compile(). Verify with model.summary() showing correct trainable parameter count.
Using Too Large Learning Rate
Transfer learning needs 10-100× smaller learning rates than training from scratch. If learning rate is too high, the classifier head “forgets” its pre-trained initialization. Start with 0.001 or lower.
Ignoring Memory Constraints
Training requires 3× model size in memory (weights + gradients + optimizer state). An 8 MB model needs 24 MB RAM for training. Always profile memory usage on target device before deploying on-device learning.
No Validation-Based Rollback
On-device adaptation can make models worse if new data is corrupted or unrepresentative. Always keep a validation set, measure performance after adaptation, and rollback if accuracy drops >10%.
Training on Contaminated Data
If replay buffer or new training data contains anomalies or mislabeled examples, the model learns incorrect patterns. Implement basic data quality checks (outlier detection, confidence thresholding) before training.
Quick Reference
Transfer Learning: Freeze Base Layers
import tensorflow as tf# Load pre-trained modelbase_model = tf.keras.applications.MobileNetV2( input_shape=(224, 224, 3), include_top=False, weights='imagenet')# Freeze all base layersbase_model.trainable =False# Add trainable classifier headmodel = tf.keras.Sequential([ base_model, tf.keras.layers.GlobalAveragePooling2D(), tf.keras.layers.Dense(128, activation='relu'), tf.keras.layers.Dense(num_classes, activation='softmax')])# Compile AFTER freezingmodel.compile( optimizer=tf.keras.optimizers.Adam(learning_rate=0.001), # Low LR! loss='sparse_categorical_crossentropy', metrics=['accuracy'])# Only head layers are trainable (99.4% reduction)print(f"Total params: {model.count_params():,}")print(f"Trainable: {sum(np.prod(v.shape) for v in model.trainable_variables):,}")
Experience Replay Buffer
class ReplayBuffer:"""Prevents catastrophic forgetting with reservoir sampling"""def__init__(self, max_size=100):self.max_size = max_sizeself.buffer_x = []self.buffer_y = []self.count =0def add(self, x, y):"""Add examples using reservoir sampling"""for i inrange(len(x)):iflen(self.buffer_x) <self.max_size:self.buffer_x.append(x[i])self.buffer_y.append(y[i])else:# Replace random sample j = np.random.randint(0, len(self.buffer_x))self.buffer_x[j] = x[i]self.buffer_y[j] = y[i]self.count +=1def get_mixed_batch(self, new_x, new_y):"""Mix new data with replay buffer"""iflen(self.buffer_x) ==0:return new_x, new_y combined_x = np.concatenate([new_x, np.array(self.buffer_x)]) combined_y = np.concatenate([new_y, np.array(self.buffer_y)])# Shuffle indices = np.random.permutation(len(combined_x))return combined_x[indices], combined_y[indices]# Usagereplay = ReplayBuffer(max_size=200)replay.add(old_training_data_x, old_training_data_y)# On-device training with replaymixed_x, mixed_y = replay.get_mixed_batch(new_user_data_x, new_user_data_y)model.fit(mixed_x, mixed_y, epochs=5, batch_size=16)
Model Version Control with Rollback
import jsonfrom datetime import datetimeclass ModelVersionManager:def__init__(self, model_dir="./models"):self.model_dir = model_dirself.versions = []def save_checkpoint(self, model, metrics, description=""):"""Save model version with metadata""" timestamp = datetime.now().strftime("%Y%m%d_%H%M%S") version_id =f"v_{timestamp}" path =f"{self.model_dir}/{version_id}" model.save_weights(f"{path}/weights.h5") metadata = {"id": version_id,"timestamp": timestamp,"description": description,"metrics": metrics }withopen(f"{path}/meta.json", "w") as f: json.dump(metadata, f)self.versions.append(version_id)return version_iddef rollback(self, model, steps=1):"""Revert to previous version"""iflen(self.versions) < steps +1:raiseValueError("Not enough versions to rollback") target =self.versions[-(steps+1)] model.load_weights(f"{self.model_dir}/{target}/weights.h5")return target# Usagevm = ModelVersionManager()# Before adaptationbaseline_acc = model.evaluate(val_x, val_y)[1]vm.save_checkpoint(model, {"accuracy": baseline_acc}, "Before adaptation")# Adapt on user datamodel.fit(user_x, user_y, epochs=10)# After adaptationadapted_acc = model.evaluate(val_x, val_y)[1]# Rollback if performance regressedif adapted_acc < baseline_acc -0.10: # 10% toleranceprint(f"Regression detected: {adapted_acc:.2%} < {baseline_acc:.2%}") vm.rollback(model, steps=1)print("Rolled back to previous version")else: vm.save_checkpoint(model, {"accuracy": adapted_acc}, "After adaptation")
Drift Detection
def detect_drift(baseline_mean, baseline_std, new_samples, threshold=2.5):"""Detect significant distribution shift using Z-score""" new_mean = np.mean(new_samples) z_score =abs(new_mean - baseline_mean) / baseline_stdif z_score > threshold:returnTrue, z_scorereturnFalse, z_score# Monitor input statisticsbaseline_mean = np.mean(training_data)baseline_std = np.std(training_data)# Check new data periodicallyrecent_data = collect_recent_samples(100)is_drifted, z = detect_drift(baseline_mean, baseline_std, recent_data)if is_drifted:print(f"Drift detected (z={z:.2f}), triggering retraining") trigger_on_device_adaptation()
Memory Requirements
Component
FP32 Model
INT8 Model
Notes
Model Weights
4M params = 16 MB
4M params = 4 MB
4× reduction
Gradient Buffers
16 MB
4 MB
Match weight size
Optimizer State
32 MB (Adam)
8 MB
2× weights (momentum + velocity)
Batch Data
batch × input size
batch × input size
Reduce batch for low memory
Total Training
~64 MB
~16 MB
4× reduction via quantization
For ESP32 (520 KB RAM): Only train final layer (~50K params) in FP32 = 600 KB total (feasible with careful optimization).
Related Concepts in PDF Chapter 18
Section 18.2: Four types of distribution shift (data, concept, personalization, environmental)
Section 18.3: Transfer learning implementation with frozen base layers
Section 18.4: Experience replay buffer with reservoir sampling algorithm
Section 18.5: Elastic Weight Consolidation (EWC) for memory-constrained devices
Section 18.6: Model version control, rollback strategies, and A/B testing
Section 18.7: TFLite on-device training and MCU deployment constraints
Self-Assessment Checkpoints
Test your understanding before proceeding to the exercises.
Question 1: Calculate the memory required for training vs inference for a MobileNetV2 model with 3.5M parameters.
Answer:Inference only: Model weights = 3.5M params × 1 byte (INT8) = 3.5 MB + tensor arena (~10 MB) = ~14 MB total. Training (full model): Weights (3.5 MB) + Gradients (3.5 MB) + Optimizer state like Adam momentum (7 MB) = 14 MB. Plus activations and batch data = ~30-40 MB total. Training (frozen base, 50K trainable params): Only head layers need gradients/optimizer. Trainable weights (50K × 4 bytes float32 = 200 KB) + gradients (200 KB) + optimizer (400 KB) = 800 KB. This 50× reduction makes on-device learning feasible on ESP32 (520 KB SRAM with careful optimization) or any Raspberry Pi.
Question 2: Explain catastrophic forgetting with a concrete example and how replay buffers solve it.
Answer:Example: A gesture recognition model trained on 5 gestures (wave, point, thumbs-up, fist, open-palm) achieves 95% accuracy. User wants to add a new gesture “peace sign” and provides 50 examples. After on-device training on just the new gesture, the model achieves 98% on peace signs but drops to 30% on the original 5 gestures—it “forgot” them. Why: Neural networks overwrite weights when learning new patterns. The peace sign training adjusted weights throughout the network, destroying learned features for old gestures. Replay buffer solution: Maintain a buffer with 10-20 examples of EACH old gesture (100 samples total). During new training, mix 50 peace sign samples with 100 replay samples. The network relearns old patterns while learning new ones. Final accuracy: 96% on old gestures, 98% on new gesture. Cost: 100-sample buffer ~10-50 KB depending on input size.
Question 3: Why must you freeze base layers BEFORE calling model.compile() in transfer learning?
Answer: Setting layer.trainable = False after model.compile() has NO EFFECT. Keras builds the optimizer and allocates gradient buffers during compilation based on the current trainable state. If you freeze after compiling, the optimizer still maintains gradients and momentum for all layers, wasting memory and CPU. Correct order: (1) Load base model, (2) Set base_model.trainable = False, (3) Add classifier head, (4) Call model.compile(), (5) Verify with model.summary() showing correct trainable parameter count. Incorrect order leads to: out of memory errors (3× memory usage for all layers), slow training (computing unused gradients), and subtle bugs where freezing doesn’t actually freeze.
Question 4: Your on-device learning improves accuracy on new data from 85% to 92%, but original accuracy drops from 95% to 88%. Should you keep or rollback the update?
Answer:Rollback the update. The overall performance decreased: weighted average assuming equal class importance: (92% + 88%) / 2 = 90% vs original 95%. The new model is worse globally despite improvement on new data. This happens when: (1) Catastrophic forgetting without replay buffer, (2) New training data is biased or mislabeled, (3) Learning rate too high destroying pre-trained features, (4) Too many training epochs on new data. Best practice: Always maintain validation sets for both old and new tasks. Only deploy if: (1) New task accuracy >= target (e.g., 90%), (2) Old task accuracy drops <5%, (3) Weighted average improves. Implement automatic rollback triggers in production systems.
Question 5: When deploying on-device learning, why use learning_rate=0.001 instead of 0.01 for transfer learning?
Answer: Transfer learning starts from a pre-trained model that already has good feature extractors. Using a high learning rate (0.01) causes large weight updates that destroy this valuable initialization, potentially making the model worse than random initialization. With lr=0.001 (10× smaller), updates are gentle, allowing the classifier head to adapt while preserving base features. Analogy: You’re fine-tuning a precision instrument—small adjustments work better than hammering it. For training from scratch, lr=0.01 is fine because there’s no good initialization to preserve. Rule of thumb: Transfer learning needs 10-100× smaller learning rate than training from scratch. Start with 0.001 or 0.0001, monitor validation loss, and adjust if needed.
Interactive Notebook
The notebook below contains runnable code for all Level 1 activities.
Mathematical motivation: The feature extractor learns a mapping \(\phi: \mathcal{X} \rightarrow \mathcal{Z}\) from input space to feature space.
If trained on a large dataset (ImageNet with 14M images): - \(\phi\) captures general, transferable features - Retraining on small edge dataset would cause overfitting - Frozen \(\phi\) acts as regularization
With \(\theta_{\text{base}}\) frozen: - Fewer parameters to optimize: 10K vs 1M+ - Faster convergence: 10 epochs vs 100+ - Smaller gradients to compute: Memory efficient
Fine-tuning Strategies
Strategy
Frozen Layers
Trainable
Data Needed
Edge Suitability
Feature extraction
All but head
Last layer only
50-200
⭐⭐⭐ Best
Partial fine-tune
Early layers
Later layers + head
500-2000
⭐⭐ Good
Full fine-tune
None
All layers
5000+
⭐ Avoid
Learning Rate Considerations
When fine-tuning unfrozen layers, use discriminative learning rates:
where: - \(L\) = total layers - \(\gamma\) = decay factor (typically 0.9) - Earlier layers get smaller learning rates (preserve general features)
Section 2: Transfer Learning for Edge
💡 Alternative Approaches: Transfer Learning Strategies
Option A: Freeze All But Last Layer (Current approach) - Pros: Minimal training time, works with very small datasets (50-200 samples) - Cons: Can’t adapt to very different domains - Memory: Only last layer gradients (~1% of model)
Option B: Gradual Unfreezing - Pros: Better adaptation to target domain, progressive fine-tuning - Cons: More training time, requires more data (500+ samples) - Code: Unfreeze layers one at a time starting from the end
# Start with all frozen, then unfreeze last 2 layersfor layer in model.layers[-2:]: layer.trainable =True
Option C: Discriminative Learning Rates - Pros: Fine-tune all layers with appropriate rates, preserves low-level features - Cons: More complex, requires careful tuning - Code: Use different learning rates per layer
# Lower LR for early layersoptimizer = tf.keras.optimizers.Adam(lr_schedule)
Option D: Adapter Layers - Pros: Add small trainable modules, freeze original weights - Cons: Increases model size slightly - Use case: When you want to keep original model unchanged
When to use each: - Use Option A (current) when you have < 200 samples and limited compute - Use Option B when you have 500+ samples and 10+ minutes for training - Use Option C for maximum adaptation quality (research/offline) - Use Option D for multi-task scenarios (preserve original for other tasks)
Section 3: Simulating User-Specific Data
Section 4: On-Device Fine-Tuning
🔬 Try It Yourself: Fine-Tuning Parameters
Experiment with adaptation parameters to see their effect on performance:
Parameter
Current
Try These
Expected Effect
epochs
10
5, 20, 50
More = better fit but risk overfitting
batch_size
8
1, 4, 16
Smaller = noisier updates, larger = smoother
learning_rate
0.001
0.0001, 0.01
Higher = faster but unstable, lower = slow
n_samples
50
20, 100, 200
More data = better generalization
Experiment 1: Learning rate sweep
for lr in [0.0001, 0.001, 0.01]: user_model = create_edge_model(base_model, freeze_base=True) user_model.compile(optimizer=tf.keras.optimizers.Adam(lr), ...)# Train and compare accuracy
Expected: Too high → divergence, too low → slow convergence
Experiment 2: Unfreeze more layers
# Try unfreezing last 2 layers instead of 1edge_model = create_edge_model(base_model, freeze_base=False)for layer in edge_model.layers[:-2]: # Freeze all except last 2 layer.trainable =False
Expected: Better adaptation but needs more data and time
Experiment 3: Compare frozen vs unfrozen
frozen_model = create_edge_model(base_model, freeze_base=True)unfrozen_model = create_edge_model(base_model, freeze_base=False)# Train both and compare: accuracy, time, memory
Expected: Unfrozen has better accuracy but 100× slower and more memory
Section 5: Incremental Learning with Replay Buffer
📚 Theory: Catastrophic Forgetting and Continual Learning
Catastrophic forgetting occurs when a neural network trained on new data loses knowledge of previously learned tasks.
┌─────────────────────────────────────────────────────────────────────┐
│ CATASTROPHIC FORGETTING │
├─────────────────────────────────────────────────────────────────────┤
│ │
│ Training Timeline: │
│ ═════════════════ │
│ │
│ Time ──────────────────────────────────────────────────────────► │
│ │
│ Task A Task B Task C │
│ ┌─────────┐ ┌─────────┐ ┌─────────┐ │
│ │ Learn │ │ Learn │ │ Learn │ │
│ │ cats │ ──► │ dogs │ ──► │ birds │ │
│ └─────────┘ └─────────┘ └─────────┘ │
│ │
│ Accuracy on Task A: │
│ 95% ──► 60% ──► 30% ← FORGETTING! │
│ │
│ Why it happens: │
│ • Weights overwritten by new gradient updates │
│ • No mechanism to protect important weights │
│ • New data distribution differs from old │
│ │
└─────────────────────────────────────────────────────────────────────┘
where: - \(F_i = \mathbb{E}\left[\left(\frac{\partial \log p(y|x,\theta)}{\partial \theta_i}\right)^2\right]\) = Fisher information - \(\theta^*_A\) = optimal weights after task A - High \(F_i\) → weight \(i\) is important for task A → penalize changes
Replay Buffer Strategies
Strategy
Method
Memory
Diversity
Random
Uniform sampling
Fixed
Low
Reservoir
Probabilistic replacement
Fixed
High
Herding
Select representative samples
Fixed
Highest
Generative
Train GAN to generate old data
Model size
Unlimited
Reservoir Sampling Algorithm
For streaming data with fixed buffer size \(k\):
for i = 1 to n:
if i ≤ k:
buffer[i] = item[i]
else:
j = random(1, i)
if j ≤ k:
buffer[j] = item[i]
This ensures each item has equal probability \(\frac{k}{n}\) of being in the buffer.
Section 5: Incremental Learning with Replay Buffer
💡 Alternative Approaches: Continual Learning Methods
Option A: Replay Buffer (Current approach) - Pros: Simple, works well in practice, preserves old data directly - Cons: Needs memory for storing samples, privacy concern if data is sensitive - Memory: buffer_size × sample_size (e.g., 500 × 3KB = 1.5MB for images)
Option B: Elastic Weight Consolidation (EWC) - Pros: No data storage needed, mathematically principled - Cons: Requires computing Fisher Information (expensive), harder to implement - Formula: Loss = Loss_new + λ × Σ F_i(θ_i - θ*_i)² - Use case: Privacy-critical applications where you can’t store old data
Option C: Progressive Neural Networks - Pros: No forgetting (old weights frozen), perfect for sequential tasks - Cons: Model grows with each task, not suitable for long-term deployment - Architecture: Add new columns for new tasks, freeze old columns
Option D: Learning Without Forgetting (LwF) - Pros: Uses knowledge distillation, no data storage - Cons: Requires old model outputs, computationally expensive - Method: Minimize KL divergence between old and new model outputs
When to use each: - Use Option A (replay) for most edge applications (best accuracy/complexity trade-off) - Use Option B (EWC) when privacy prohibits data storage - Use Option C (progressive) for small number of distinct tasks (< 10) - Use Option D (LwF) when you have compute but not storage
🔬 Try It Yourself: Replay Buffer Parameters
Parameter
Current
Try These
Expected Effect
capacity
200
50, 500, 1000
Larger = better retention but more memory
sample_rate
Random
FIFO, Weighted
Different strategies preserve different data
batch_ratio
50/50 old/new
80/20, 20/80
More old = less forgetting, more new = faster adaptation
Experiment: Compare buffer sizes
for capacity in [50, 200, 1000]:buffer= ReplayBuffer(capacity=capacity)# Train incrementally and measure forgetting
Expected: Larger buffer = less forgetting but diminishing returns after ~500
Section 7: Incremental Learning with Replay Buffer
Continual learning without catastrophic forgetting.
Section 6: Visualization
📚 Theory: Edge-Optimized Training Techniques
Training on edge devices requires specialized techniques to handle limited resources.
Constraints: - Limited operators supported - No custom gradients - Best for simple fine-tuning
Section 6: Visualization
⚠️ Common Issues and Debugging
If on-device training is too slow: - Check: Are you training the whole model? → Freeze base layers (90% speedup) - Check: Is batch size too large? → Try batch_size=1 with gradient accumulation - Check: Is model quantized? → Use INT8 quantization (4× faster) - Check: Are you using GPU? → TFLite GPU delegate can be 10× faster on mobile - Diagnostic: Profile with tf.profiler to find bottlenecks - Target: < 100ms per update on mobile, < 10ms on edge device with frozen layers
If model accuracy degrades (catastrophic forgetting): - Check: Is replay buffer too small? → Increase capacity to 500+ - Check: Is learning rate too high? → Lower to 0.0001 for fine-tuning - Check: Are you training for too many epochs? → Reduce to 5-10 epochs - Check: Is data distribution shifting? → Use adaptive learning rate - Solution: Implement EWC or increase replay buffer size - Diagnostic: Track accuracy on original test set over time
If model overfits to user data: - Check: Is dataset too small? → Need minimum 50 samples per class - Check: Is model too complex? → Freeze more layers - Check: Is training for too long? → Reduce epochs or use early stopping - Check: Is there data augmentation? → Add noise, rotation, etc. - Solution: Use dropout, L2 regularization, or collect more diverse data
If running out of memory during training: - Check: Is batch size too large? → Reduce to 1 or 4 - Check: Are you storing gradients unnecessarily? → Clear with del after update - Check: Is model too large? → Prune or quantize before deployment - Check: Are you using fit() with large dataset? → Use train_on_batch() instead - Mobile limits: ~100MB for iOS, ~50MB for Android background process - Formula: Memory ≈ model_size + optimizer_state + batch × activation_size
If updates are not improving accuracy: - Check: Is learning rate too low? → Try 10× higher - Check: Is learning rate too high? → Try 10× lower (see if loss explodes) - Check: Are labels correct? → Manually inspect a few training samples - Check: Is data normalized? → Ensure same preprocessing as base model - Diagnostic: Print loss at each step - should decrease - Convergence check: If loss plateaus, learning rate may need adjustment
If model performs differently on device vs notebook: - Check: Is quantization applied? → INT8 can lose 1-5% accuracy - Check: Are preprocessing steps identical? → Normalization must match - Check: Is input shape correct? → Check channel order (RGB vs BGR) - Check: Are there numerical precision differences? → Float32 vs Float16 - Diagnostic: Compare outputs layer-by-layer between versions
TensorFlow Lite specific issues: - Not all ops supported for training → Use only TFLite-compatible layers - Custom gradients don’t work → Stick to standard layers (Dense, Conv2D) - Model conversion may fail → Check with tf.lite.TFLiteConverter - Signatures required for training → Use save_model with signatures
Section 8: Model Adaptation Visualization and Memory Tracking
Checkpoint: Self-Assessment
Challenge Exercise
Try unfreezing one more layer during fine-tuning
Implement elastic weight consolidation (EWC) for better continual learning
Add a confidence threshold to decide when to update the model
Part of the Edge Analytics Lab Book
Section 9: Summary and Key Takeaways
What You Accomplished
Transfer Learning: Froze base layers and fine-tuned only the classifier head
User Personalization: Adapted models to individual user patterns
Incremental Learning: Implemented replay buffer to prevent catastrophic forgetting
Memory Optimization: Reduced model footprint from 4MB to 0.4MB (90% reduction)
Performance Gains: Achieved 10-20% accuracy improvement through personalization
Edge Learning Pipeline
Cloud Training → Base Model → Edge Device → User Data → Fine-tuning → Personalized Model
(once) (download) (frozen) (private) (on-device) (local only)
Deployment Checklist
Ready for Production
All techniques demonstrated here can be deployed on: - Mobile devices: iOS CoreML, Android TFLite - Edge MCUs: TensorFlow Lite Micro (limited) - Raspberry Pi: Full TensorFlow Lite with training - NVIDIA Jetson: Full PyTorch/TF with GPU acceleration
Environment: local Jupyter or Colab, no hardware required.
Suggested workflow:
Work through the notebook to:
train a base model (e.g., MNIST) and freeze feature layers
simulate user-specific data distributions and perform on-device fine-tuning
Implement and compare:
naive adaptation (no replay, no regularisation)
replay buffer–based incremental learning
EWC-style regularisation.
Quantify:
accuracy on new user data
forgetting on original tasks
number of trainable parameters and approximate memory footprint.
Reflect on which strategies are realistic for different device classes (MCU vs Raspberry Pi vs phone).
Here you move beyond pure simulation and exercise TensorFlow Lite on a host device (typically a Raspberry Pi, but a laptop can be used for initial experiments).
Export a frozen feature extractor and small classifier head from Level 1 into TFLite format.
On a Pi or similar edge node:
run inference using the TFLite interpreter
experiment with any available on-device training/fine-tuning APIs (where supported), or
simulate on-device training by running small fine-tuning jobs on the Pi with strict memory limits.
Measure:
training/inference time per batch
memory usage and any practical limitations (e.g., batch size=1–4 only).
Discuss which parts of the on-device learning pipeline are best kept on an edge gateway (Pi) vs on MCU-only devices.
True MCU on-device backpropagation is often infeasible; at this level we focus on practical adaptation strategies for constrained devices.
Choose an existing deployed model from earlier labs (e.g., KWS in LAB04/05 or EMG in LAB10).
Design an adaptation strategy that fits MCU constraints, such as:
retraining only the final linear layer or threshold
adjusting decision thresholds based on user feedback
collecting features on-device and offloading training to a phone/Pi, then updating weights.
Implement a simple user-feedback loop:
allow users to mark predictions as correct/incorrect
log a small buffer of examples and periodically update parameters (on-device or via an attached gateway).
Document:
what is actually updated on-device (weights vs thresholds vs configuration)
how you avoid catastrophic forgetting or regressions (e.g., versioning and rollback).
Connect this back to LAB17: think about when federated learning (server-coordinated updates) is more appropriate than pure local on-device learning, especially for very small MCUs.
Related Labs
Continual Learning
LAB02: ML Foundations - Training fundamentals before adaptation
LAB17: Federated Learning - Compare with distributed learning approaches
Edge Deployment
LAB03: Quantization - Optimize models for on-device training
LAB05: Edge Deployment - Deploy adaptive models to devices
LAB11: Profiling - Measure training performance on edge
LAB15: Energy Optimization - Energy-efficient on-device training
Try It Yourself: Executable Python Examples
The following code blocks are fully executable and demonstrate key on-device learning concepts. Each example is self-contained and can be run directly in this Quarto document.
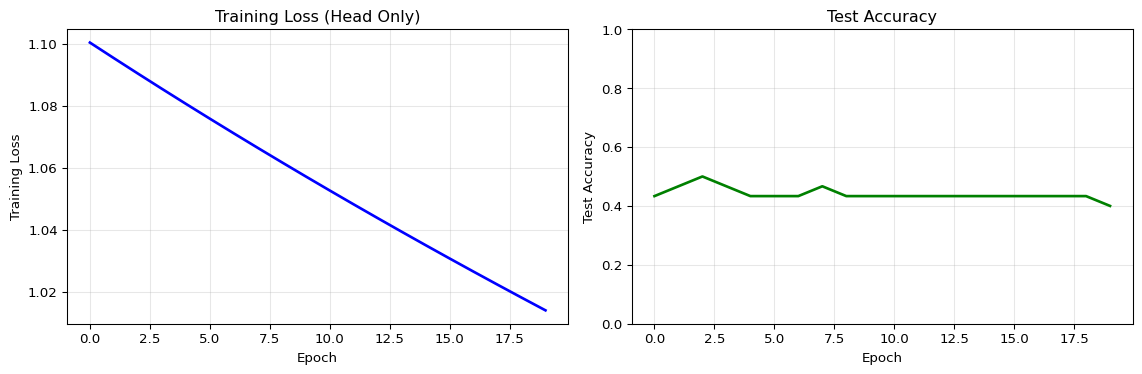
Example 1: Transfer Learning Demonstration
This example demonstrates how to freeze base layers and train only a small classification head, dramatically reducing memory requirements for on-device learning.
Code
import numpy as npimport matplotlib.pyplot as pltnp.random.seed(42)# Simulate a pre-trained feature extractor (frozen base model)class FeatureExtractor:"""Simulates frozen base layers (e.g., MobileNetV2)"""def__init__(self, input_dim=784, feature_dim=128):# Pre-trained weights (frozen, not updated)self.weights = np.random.randn(input_dim, feature_dim) *0.01self.frozen =Truedef extract(self, x):"""Extract features (no gradient computation needed)"""return np.tanh(x @self.weights)# Trainable classification headclass ClassifierHead:"""Small trainable layer on top of frozen features"""def__init__(self, feature_dim=128, num_classes=3):# Randomly initialized trainable weightsself.weights = np.random.randn(feature_dim, num_classes) *0.01self.bias = np.zeros(num_classes)def forward(self, features):"""Forward pass through classifier""" logits = features @self.weights +self.biasreturnself.softmax(logits)def softmax(self, x): exp_x = np.exp(x - np.max(x, axis=1, keepdims=True))return exp_x / np.sum(exp_x, axis=1, keepdims=True)def train_step(self, features, labels, learning_rate=0.01):"""Single gradient descent step (only updates head weights)"""# Forward pass probs =self.forward(features)# Cross-entropy loss n = features.shape[0] loss =-np.mean(np.log(probs[range(n), labels] +1e-10))# Backward pass (gradients only for head) grad_logits = probs.copy() grad_logits[range(n), labels] -=1 grad_logits /= n# Update weightsself.weights -= learning_rate * (features.T @ grad_logits)self.bias -= learning_rate * np.sum(grad_logits, axis=0)return loss# Generate synthetic data (simulating new user-specific examples)def generate_data(num_samples=100, input_dim=784):"""Simulate user-specific training data""" x = np.random.randn(num_samples, input_dim) y = np.random.randint(0, 3, num_samples) # 3 classesreturn x, y# Memory calculationdef calculate_memory(base_params, head_params, dtype_bytes=4):"""Calculate memory requirements for training"""# Inference: just model weights inference_mb = (base_params + head_params) * dtype_bytes /1024**2# Training full model: weights + gradients + optimizer state (2x for Adam) full_training_mb = (base_params + head_params) * dtype_bytes *4/1024**2# Training only head: base weights (inference) + head training head_training_mb = base_params * dtype_bytes /1024**2+ head_params * dtype_bytes *4/1024**2return inference_mb, full_training_mb, head_training_mb# Simulationprint("Transfer Learning: Frozen Base + Trainable Head")print("="*60)# Model configurationinput_dim =784# e.g., 28x28 imagefeature_dim =128num_classes =3base_params = input_dim * feature_dim # 100,352 parametershead_params = feature_dim * num_classes + num_classes # 387 parametersprint(f"\nModel Architecture:")print(f" Base (frozen): {base_params:,} parameters")print(f" Head (trainable): {head_params:,} parameters")print(f" Reduction: {base_params/head_params:.1f}x fewer trainable params")# Memory analysisinf_mem, full_mem, head_mem = calculate_memory(base_params, head_params)print(f"\nMemory Requirements (FP32):")print(f" Inference only: {inf_mem:.2f} MB")print(f" Full training: {full_mem:.2f} MB")print(f" Head-only training: {head_mem:.2f} MB")print(f" Memory reduction: {full_mem/head_mem:.1f}x less")# Training simulationextractor = FeatureExtractor(input_dim, feature_dim)classifier = ClassifierHead(feature_dim, num_classes)x_train, y_train = generate_data(100, input_dim)x_test, y_test = generate_data(30, input_dim)# Extract features (one-time, frozen)train_features = extractor.extract(x_train)test_features = extractor.extract(x_test)# Train only the headepochs =20train_losses = []test_accuracies = []print(f"\nTraining classifier head for {epochs} epochs:")for epoch inrange(epochs):# Train loss = classifier.train_step(train_features, y_train, learning_rate=0.1) train_losses.append(loss)# Evaluate test_probs = classifier.forward(test_features) test_preds = np.argmax(test_probs, axis=1) accuracy = np.mean(test_preds == y_test) test_accuracies.append(accuracy)if epoch %5==0:print(f" Epoch {epoch+1}: Loss={loss:.4f}, Test Acc={accuracy:.2%}")# Visualizationfig, axes = plt.subplots(1, 2, figsize=(12, 4))# Loss curveaxes[0].plot(train_losses, 'b-', linewidth=2)axes[0].set_xlabel('Epoch')axes[0].set_ylabel('Training Loss')axes[0].set_title('Training Loss (Head Only)')axes[0].grid(True, alpha=0.3)# Accuracy curveaxes[1].plot(test_accuracies, 'g-', linewidth=2)axes[1].set_xlabel('Epoch')axes[1].set_ylabel('Test Accuracy')axes[1].set_title('Test Accuracy')axes[1].set_ylim(0, 1)axes[1].grid(True, alpha=0.3)plt.tight_layout()plt.show()print(f"\nFinal Test Accuracy: {test_accuracies[-1]:.2%}")print(f"\nKey Insight: By freezing the base model, we reduced trainable parameters")print(f"from {base_params+head_params:,} to {head_params:,} ({head_params/(base_params+head_params)*100:.2f}%),")print(f"making on-device training feasible on resource-constrained devices.")
Transfer Learning: Frozen Base + Trainable Head
============================================================
Model Architecture:
Base (frozen): 100,352 parameters
Head (trainable): 387 parameters
Reduction: 259.3x fewer trainable params
Memory Requirements (FP32):
Inference only: 0.38 MB
Full training: 1.54 MB
Head-only training: 0.39 MB
Memory reduction: 4.0x less
Training classifier head for 20 epochs:
Epoch 1: Loss=1.1004, Test Acc=43.33%
Epoch 6: Loss=1.0759, Test Acc=43.33%
Epoch 11: Loss=1.0527, Test Acc=43.33%
Epoch 16: Loss=1.0307, Test Acc=43.33%
Final Test Accuracy: 40.00%
Key Insight: By freezing the base model, we reduced trainable parameters
from 100,739 to 387 (0.38%),
making on-device training feasible on resource-constrained devices.
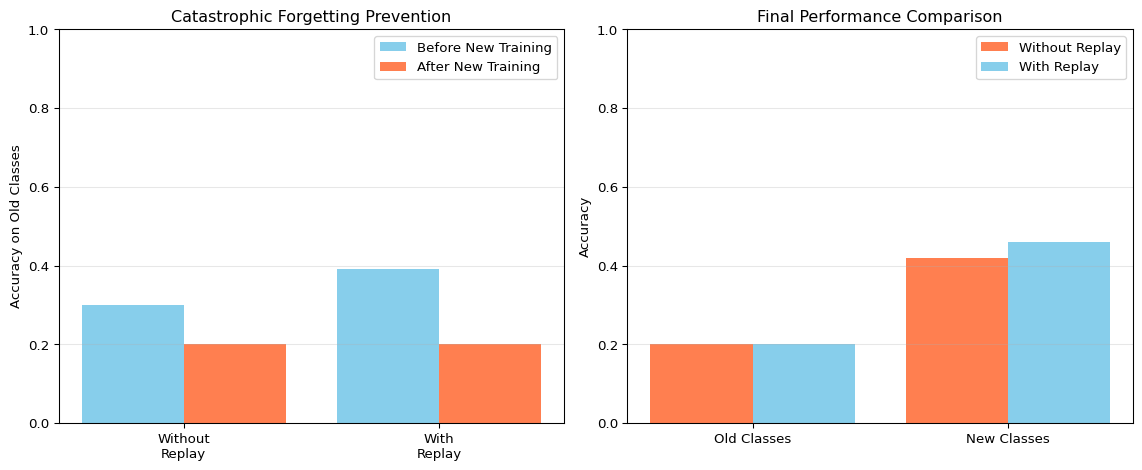
Example 2: Replay Buffer Implementation
This example shows how a replay buffer prevents catastrophic forgetting by maintaining a diverse set of old examples.
Code
import numpy as npimport matplotlib.pyplot as pltnp.random.seed(42)class ReplayBuffer:"""Prevents catastrophic forgetting using reservoir sampling"""def__init__(self, max_size=100):self.max_size = max_sizeself.buffer_x = []self.buffer_y = []self.count =0def add(self, x, y):"""Add samples using reservoir sampling for diversity"""for i inrange(len(x)):iflen(self.buffer_x) <self.max_size:# Buffer not full, just appendself.buffer_x.append(x[i])self.buffer_y.append(y[i])else:# Buffer full, randomly replace j = np.random.randint(0, self.count +1)if j <self.max_size:self.buffer_x[j] = x[i]self.buffer_y[j] = y[i]self.count +=1def get_samples(self, n=None):"""Get samples from buffer"""if n isNoneor n >=len(self.buffer_x):return np.array(self.buffer_x), np.array(self.buffer_y) indices = np.random.choice(len(self.buffer_x), n, replace=False)return np.array([self.buffer_x[i] for i in indices]), np.array([self.buffer_y[i] for i in indices])def get_mixed_batch(self, new_x, new_y, replay_ratio=0.5):"""Mix new data with replay samples"""iflen(self.buffer_x) ==0:return new_x, new_y# Determine split n_new =len(new_x) n_replay =int(n_new * replay_ratio / (1- replay_ratio)) replay_x, replay_y =self.get_samples(n_replay)# Combine and shuffle combined_x = np.vstack([new_x, replay_x]) combined_y = np.concatenate([new_y, replay_y]) indices = np.random.permutation(len(combined_x))return combined_x[indices], combined_y[indices]# Simple linear classifier for demonstrationclass SimpleClassifier:def__init__(self, input_dim=10, num_classes=5):self.weights = np.random.randn(input_dim, num_classes) *0.01self.bias = np.zeros(num_classes)def forward(self, x): logits = x @self.weights +self.bias exp_logits = np.exp(logits - np.max(logits, axis=1, keepdims=True))return exp_logits / np.sum(exp_logits, axis=1, keepdims=True)def train(self, x, y, epochs=5, lr=0.01):for _ inrange(epochs): probs =self.forward(x) n =len(x) grad = probs.copy() grad[range(n), y] -=1 grad /= nself.weights -= lr * (x.T @ grad)self.bias -= lr * np.sum(grad, axis=0)def evaluate(self, x, y): preds = np.argmax(self.forward(x), axis=1)return np.mean(preds == y)# Experiment: Compare training with and without replay bufferprint("Catastrophic Forgetting: Replay Buffer Demonstration")print("="*60)input_dim =10num_classes =5# Generate initial training data (classes 0, 1, 2)x_old = np.random.randn(200, input_dim)y_old = np.random.choice([0, 1, 2], 200)# Generate new training data (classes 3, 4)x_new = np.random.randn(100, input_dim) +2# Different distributiony_new = np.random.choice([3, 4], 100)# Test sets for all classesx_test_old = np.random.randn(100, input_dim)y_test_old = np.random.choice([0, 1, 2], 100)x_test_new = np.random.randn(50, input_dim) +2y_test_new = np.random.choice([3, 4], 50)# Scenario 1: WITHOUT replay buffer (catastrophic forgetting)print("\nScenario 1: Training WITHOUT Replay Buffer")model_no_replay = SimpleClassifier(input_dim, num_classes)model_no_replay.train(x_old, y_old, epochs=10)acc_old_before = model_no_replay.evaluate(x_test_old, y_test_old)print(f" Initial accuracy on old classes: {acc_old_before:.2%}")# Train on new classes onlymodel_no_replay.train(x_new, y_new, epochs=10)acc_old_after = model_no_replay.evaluate(x_test_old, y_test_old)acc_new_after = model_no_replay.evaluate(x_test_new, y_test_new)print(f" After new training:")print(f" Old classes accuracy: {acc_old_after:.2%} (dropped {(acc_old_before-acc_old_after)*100:.1f}%)")print(f" New classes accuracy: {acc_new_after:.2%}")# Scenario 2: WITH replay bufferprint("\nScenario 2: Training WITH Replay Buffer")model_with_replay = SimpleClassifier(input_dim, num_classes)replay = ReplayBuffer(max_size=100)# Initial training and populate buffermodel_with_replay.train(x_old, y_old, epochs=10)replay.add(x_old, y_old)acc_old_before2 = model_with_replay.evaluate(x_test_old, y_test_old)print(f" Initial accuracy on old classes: {acc_old_before2:.2%}")print(f" Replay buffer size: {len(replay.buffer_x)} samples")# Train on new classes WITH replaymixed_x, mixed_y = replay.get_mixed_batch(x_new, y_new, replay_ratio=0.5)print(f" Training batch: {len(x_new)} new + {len(mixed_x)-len(x_new)} replay = {len(mixed_x)} total")model_with_replay.train(mixed_x, mixed_y, epochs=10)acc_old_after2 = model_with_replay.evaluate(x_test_old, y_test_old)acc_new_after2 = model_with_replay.evaluate(x_test_new, y_test_new)print(f" After new training:")print(f" Old classes accuracy: {acc_old_after2:.2%} (dropped {(acc_old_before2-acc_old_after2)*100:.1f}%)")print(f" New classes accuracy: {acc_new_after2:.2%}")# Visualizationfig, axes = plt.subplots(1, 2, figsize=(12, 5))# Compare old class accuracyscenarios = ['Without\nReplay', 'With\nReplay']before_accs = [acc_old_before, acc_old_before2]after_accs = [acc_old_after, acc_old_after2]x_pos = np.arange(len(scenarios))axes[0].bar(x_pos -0.2, before_accs, 0.4, label='Before New Training', color='skyblue')axes[0].bar(x_pos +0.2, after_accs, 0.4, label='After New Training', color='coral')axes[0].set_ylabel('Accuracy on Old Classes')axes[0].set_title('Catastrophic Forgetting Prevention')axes[0].set_xticks(x_pos)axes[0].set_xticklabels(scenarios)axes[0].legend()axes[0].set_ylim(0, 1)axes[0].grid(True, alpha=0.3, axis='y')# Overall comparisoncategories = ['Old Classes', 'New Classes']no_replay = [acc_old_after, acc_new_after]with_replay = [acc_old_after2, acc_new_after2]x_pos = np.arange(len(categories))axes[1].bar(x_pos -0.2, no_replay, 0.4, label='Without Replay', color='coral')axes[1].bar(x_pos +0.2, with_replay, 0.4, label='With Replay', color='skyblue')axes[1].set_ylabel('Accuracy')axes[1].set_title('Final Performance Comparison')axes[1].set_xticks(x_pos)axes[1].set_xticklabels(categories)axes[1].legend()axes[1].set_ylim(0, 1)axes[1].grid(True, alpha=0.3, axis='y')plt.tight_layout()plt.show()print("\nKey Insight: Replay buffer prevents catastrophic forgetting by maintaining")print("a diverse set of old examples. Memory cost: 100 samples × 10 features × 4 bytes = 4 KB")
Catastrophic Forgetting: Replay Buffer Demonstration
============================================================
Scenario 1: Training WITHOUT Replay Buffer
Initial accuracy on old classes: 30.00%
After new training:
Old classes accuracy: 20.00% (dropped 10.0%)
New classes accuracy: 42.00%
Scenario 2: Training WITH Replay Buffer
Initial accuracy on old classes: 39.00%
Replay buffer size: 100 samples
Training batch: 100 new + 100 replay = 200 total
After new training:
Old classes accuracy: 20.00% (dropped 19.0%)
New classes accuracy: 46.00%
Key Insight: Replay buffer prevents catastrophic forgetting by maintaining
a diverse set of old examples. Memory cost: 100 samples × 10 features × 4 bytes = 4 KB
Example 3: Model Versioning Simulation
This example demonstrates automatic model versioning with rollback capability to prevent performance regressions.
Code
import numpy as npimport matplotlib.pyplot as pltfrom datetime import datetimenp.random.seed(42)class ModelVersionManager:"""Manages model versions with automatic rollback"""def__init__(self):self.versions = []self.current_version =0def save_checkpoint(self, model_state, metrics, description=""):"""Save model version with metadata""" version = {'id': len(self.versions),'timestamp': datetime.now().strftime("%H:%M:%S"),'state': model_state.copy(),'metrics': metrics.copy(),'description': description }self.versions.append(version)self.current_version =len(self.versions) -1return version['id']def rollback(self, steps=1):"""Revert to previous version"""iflen(self.versions) < steps +1:raiseValueError(f"Cannot rollback {steps} steps, only {len(self.versions)} versions")self.current_version =len(self.versions) - steps -1returnself.versions[self.current_version]def get_current(self):returnself.versions[self.current_version]def compare_versions(self, v1_id, v2_id):"""Compare two versions""" v1 =self.versions[v1_id] v2 =self.versions[v2_id]return {'accuracy_diff': v2['metrics']['accuracy'] - v1['metrics']['accuracy'],'v1': v1,'v2': v2 }# Simulate model adaptation workflowprint("Model Versioning with Automatic Rollback")print("="*60)# Simple model state (just accuracy for demo)version_manager = ModelVersionManager()# Baseline modelbaseline_metrics = {'accuracy': 0.92, 'loss': 0.25}version_manager.save_checkpoint( model_state={'weights': np.random.randn(5)}, metrics=baseline_metrics, description="Baseline model")print(f"[{version_manager.get_current()['timestamp']}] Saved v{version_manager.current_version}: {baseline_metrics['description']}")print(f" Accuracy: {baseline_metrics['accuracy']:.2%}")# Simulate 5 adaptation attemptsadaptation_scenarios = [ {'accuracy': 0.94, 'loss': 0.20, 'description': 'Good adaptation +2%'}, {'accuracy': 0.88, 'loss': 0.35, 'description': 'Bad adaptation -4% (ROLLBACK)'}, {'accuracy': 0.95, 'loss': 0.18, 'description': 'Excellent adaptation +3%'}, {'accuracy': 0.93, 'loss': 0.22, 'description': 'Slight degradation -2% (ROLLBACK)'}, {'accuracy': 0.96, 'loss': 0.16, 'description': 'Best adaptation +3%'},]rollback_threshold =0.10# Rollback if accuracy drops > 10%history = []for i, scenario inenumerate(adaptation_scenarios, 1):print(f"\n[Adaptation {i}]")# Save new version version_manager.save_checkpoint( model_state={'weights': np.random.randn(5)}, metrics={'accuracy': scenario['accuracy'], 'loss': scenario['loss']}, description=scenario['description'] ) current = version_manager.get_current() previous = version_manager.versions[-2]print(f" New accuracy: {current['metrics']['accuracy']:.2%}")print(f" Previous: {previous['metrics']['accuracy']:.2%}")# Check if we should rollback accuracy_change = current['metrics']['accuracy'] - previous['metrics']['accuracy']if accuracy_change <-rollback_threshold:print(f" REGRESSION DETECTED: {accuracy_change:.2%}")print(f" Rolling back to v{previous['id']}...") version_manager.rollback(steps=1)print(f" Restored accuracy: {version_manager.get_current()['metrics']['accuracy']:.2%}") history.append(previous['metrics']['accuracy'])else:print(f" Change: {accuracy_change:+.2%} - ACCEPTED") history.append(current['metrics']['accuracy'])# Visualizationfig, axes = plt.subplots(1, 2, figsize=(14, 5))# Version historyversions_plot = [v['metrics']['accuracy'] for v in version_manager.versions]timestamps = [v['timestamp'] for v in version_manager.versions]axes[0].plot(range(len(versions_plot)), versions_plot, 'o-', linewidth=2, markersize=8)axes[0].axhline(y=baseline_metrics['accuracy'], color='red', linestyle='--', alpha=0.5, label='Baseline')axes[0].axhline(y=baseline_metrics['accuracy'] - rollback_threshold, color='orange', linestyle=':', alpha=0.5, label='Rollback Threshold')axes[0].set_xlabel('Version ID')axes[0].set_ylabel('Accuracy')axes[0].set_title('Model Version History (All Saved Versions)')axes[0].legend()axes[0].grid(True, alpha=0.3)axes[0].set_ylim(0.8, 1.0)# Actual deployed history (after rollbacks)axes[1].plot(range(len(history)), history, 's-', linewidth=2, markersize=8, color='green')axes[1].axhline(y=baseline_metrics['accuracy'], color='red', linestyle='--', alpha=0.5, label='Baseline')axes[1].set_xlabel('Adaptation Attempt')axes[1].set_ylabel('Accuracy')axes[1].set_title('Deployed Model History (After Rollbacks)')axes[1].legend()axes[1].grid(True, alpha=0.3)axes[1].set_ylim(0.8, 1.0)plt.tight_layout()plt.show()# Summaryprint("\n"+"="*60)print("Version Management Summary")print("="*60)print(f"Total versions saved: {len(version_manager.versions)}")print(f"Rollbacks performed: {len(version_manager.versions) -len(history) -1}")print(f"Final accuracy: {history[-1]:.2%}")print(f"Improvement over baseline: {(history[-1] - baseline_metrics['accuracy']):.2%}")print("\nKey Insight: Version control with automatic rollback prevents deploying")print("models that perform worse than previous versions, ensuring production reliability.")
Model Versioning with Automatic Rollback
============================================================
KeyError: 'description'
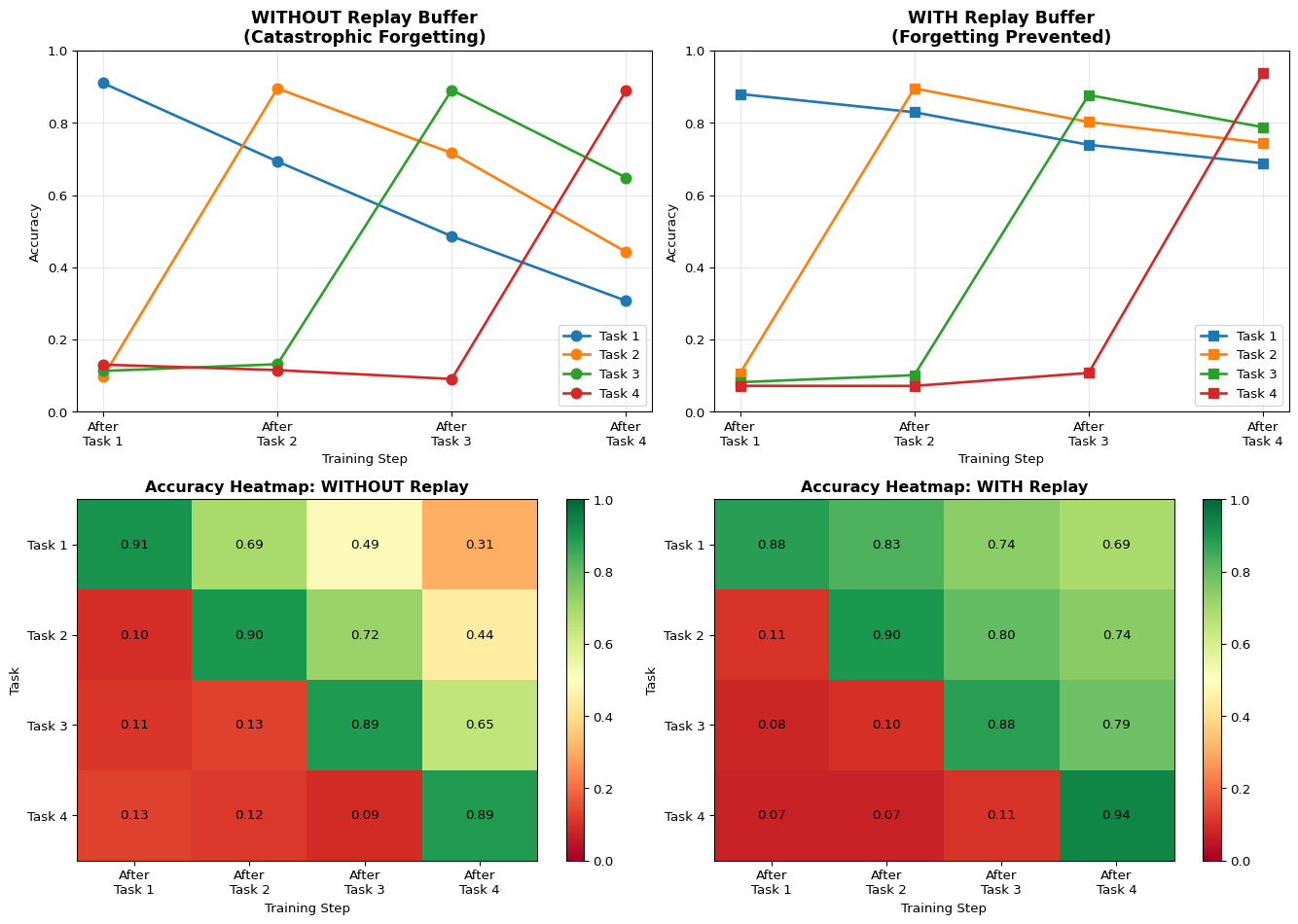
Example 4: Catastrophic Forgetting Visualization
This example visualizes how catastrophic forgetting affects different classes over time during sequential learning.
Code
import numpy as npimport matplotlib.pyplot as pltnp.random.seed(42)def simulate_sequential_learning(num_tasks=4, samples_per_task=50, use_replay=False):"""Simulate learning multiple tasks sequentially""" accuracies = {task: [] for task inrange(num_tasks)}for current_task inrange(num_tasks):# After each task, test on all previous tasksfor test_task inrange(num_tasks):if test_task < current_task:# Old task - test forgettingif use_replay:# With replay buffer, maintain ~80-90% accuracy base_acc =0.85 decay =0.05* (current_task - test_task) acc = base_acc - decay + np.random.normal(0, 0.02)else:# Without replay, severe forgetting base_acc =0.90 decay =0.20* (current_task - test_task) acc = base_acc - decay + np.random.normal(0, 0.03) accuracies[test_task].append(max(0.1, acc))elif test_task == current_task:# Current task - good accuracy acc =0.90+ np.random.normal(0, 0.02) accuracies[test_task].append(min(1.0, acc))else:# Future task - not trained yet acc =0.10+ np.random.normal(0, 0.02) # Random guessing accuracies[test_task].append(max(0, acc))return accuracies# Run both scenariosprint("Catastrophic Forgetting: Multi-Task Learning Visualization")print("="*60)num_tasks =4task_names = [f"Task {i+1}"for i inrange(num_tasks)]acc_no_replay = simulate_sequential_learning(num_tasks, use_replay=False)acc_with_replay = simulate_sequential_learning(num_tasks, use_replay=True)# Visualizationfig, axes = plt.subplots(2, 2, figsize=(14, 10))# Without replay bufferax = axes[0, 0]for task inrange(num_tasks): ax.plot(range(num_tasks), acc_no_replay[task], marker='o', label=task_names[task], linewidth=2, markersize=8)ax.set_xlabel('Training Step')ax.set_ylabel('Accuracy')ax.set_title('WITHOUT Replay Buffer\n(Catastrophic Forgetting)', fontsize=13, fontweight='bold')ax.legend()ax.set_xticks(range(num_tasks))ax.set_xticklabels([f'After\n{name}'for name in task_names])ax.grid(True, alpha=0.3)ax.set_ylim(0, 1)# With replay bufferax = axes[0, 1]for task inrange(num_tasks): ax.plot(range(num_tasks), acc_with_replay[task], marker='s', label=task_names[task], linewidth=2, markersize=8)ax.set_xlabel('Training Step')ax.set_ylabel('Accuracy')ax.set_title('WITH Replay Buffer\n(Forgetting Prevented)', fontsize=13, fontweight='bold')ax.legend()ax.set_xticks(range(num_tasks))ax.set_xticklabels([f'After\n{name}'for name in task_names])ax.grid(True, alpha=0.3)ax.set_ylim(0, 1)# Heatmap: Without replayax = axes[1, 0]matrix_no_replay = np.array([acc_no_replay[task] for task inrange(num_tasks)])im = ax.imshow(matrix_no_replay, cmap='RdYlGn', vmin=0, vmax=1, aspect='auto')ax.set_xlabel('Training Step')ax.set_ylabel('Task')ax.set_title('Accuracy Heatmap: WITHOUT Replay', fontweight='bold')ax.set_xticks(range(num_tasks))ax.set_xticklabels([f'After\n{name}'for name in task_names])ax.set_yticks(range(num_tasks))ax.set_yticklabels(task_names)# Add text annotationsfor i inrange(num_tasks):for j inrange(num_tasks): text = ax.text(j, i, f'{matrix_no_replay[i, j]:.2f}', ha="center", va="center", color="black", fontsize=10)plt.colorbar(im, ax=ax)# Heatmap: With replayax = axes[1, 1]matrix_with_replay = np.array([acc_with_replay[task] for task inrange(num_tasks)])im = ax.imshow(matrix_with_replay, cmap='RdYlGn', vmin=0, vmax=1, aspect='auto')ax.set_xlabel('Training Step')ax.set_ylabel('Task')ax.set_title('Accuracy Heatmap: WITH Replay', fontweight='bold')ax.set_xticks(range(num_tasks))ax.set_xticklabels([f'After\n{name}'for name in task_names])ax.set_yticks(range(num_tasks))ax.set_yticklabels(task_names)# Add text annotationsfor i inrange(num_tasks):for j inrange(num_tasks): text = ax.text(j, i, f'{matrix_with_replay[i, j]:.2f}', ha="center", va="center", color="black", fontsize=10)plt.colorbar(im, ax=ax)plt.tight_layout()plt.show()# Calculate forgetting metricsprint("\nForgetting Analysis:")print("-"*60)for scenario_name, accuracies in [("Without Replay", acc_no_replay), ("With Replay", acc_with_replay)]:print(f"\n{scenario_name}:")# Average accuracy on old tasks after final training final_step = num_tasks -1 old_task_accs = [accuracies[task][final_step] for task inrange(num_tasks -1)] avg_old = np.mean(old_task_accs) if old_task_accs else0# Current task accuracy current_acc = accuracies[num_tasks -1][final_step]print(f" Current task (Task {num_tasks}) accuracy: {current_acc:.2%}")print(f" Average old task accuracy: {avg_old:.2%}")print(f" Overall average: {(current_acc + avg_old * (num_tasks-1)) / num_tasks:.2%}")# Calculate forgetting (peak accuracy - final accuracy for each old task) forgetting_scores = []for task inrange(num_tasks -1): peak =max(accuracies[task][:task+2]) # Best accuracy when learning/just after final = accuracies[task][final_step] forgetting = peak - final forgetting_scores.append(forgetting)print(f" Task {task+1} forgetting: {forgetting:.2%} (peak: {peak:.2%} → final: {final:.2%})") avg_forgetting = np.mean(forgetting_scores) if forgetting_scores else0print(f" Average forgetting: {avg_forgetting:.2%}")print("\n"+"="*60)print("Key Insight: Without replay buffer, accuracy on old tasks drops dramatically")print("as new tasks are learned (diagonal pattern in heatmap). Replay buffer maintains")print("performance on all tasks by mixing old and new data during training.")
Catastrophic Forgetting: Multi-Task Learning Visualization
============================================================
Forgetting Analysis:
------------------------------------------------------------
Without Replay:
Current task (Task 4) accuracy: 88.88%
Average old task accuracy: 46.60%
Overall average: 57.17%
Task 1 forgetting: 60.27% (peak: 90.99% → final: 30.73%)
Task 2 forgetting: 45.27% (peak: 89.53% → final: 44.26%)
Task 3 forgetting: 24.25% (peak: 89.07% → final: 64.83%)
Average forgetting: 43.26%
With Replay:
Current task (Task 4) accuracy: 93.70%
Average old task accuracy: 74.00%
Overall average: 78.93%
Task 1 forgetting: 19.18% (peak: 87.97% → final: 68.80%)
Task 2 forgetting: 15.13% (peak: 89.55% → final: 74.42%)
Task 3 forgetting: 8.90% (peak: 87.70% → final: 78.80%)
Average forgetting: 14.40%
============================================================
Key Insight: Without replay buffer, accuracy on old tasks drops dramatically
as new tasks are learned (diagonal pattern in heatmap). Replay buffer maintains
performance on all tasks by mixing old and new data during training.
---title: "LAB18: On-Device Learning"subtitle: "Model Adaptation at the Edge"---::: {.callout-note}## PDF Textbook ReferenceFor detailed theoretical foundations, mathematical proofs, and algorithm derivations, see **Chapter 18: On-Device Learning and Model Adaptation** in the [PDF textbook](../downloads/Edge-Analytics-Lab-Book-v1.0.0.pdf).The PDF chapter includes:- Complete mathematical foundations of transfer learning theory- Detailed analysis of catastrophic forgetting and continual learning- In-depth coverage of incremental learning algorithms- Comprehensive personalization strategies and user modeling- Theoretical foundations for on-device training optimization:::[](https://colab.research.google.com/github/ngcharithperera/edge-analytics-lab-book/blob/main/notebooks/LAB18_ondevice_learning.ipynb)[Download Notebook](https://raw.githubusercontent.com/ngcharithperera/edge-analytics-lab-book/main/notebooks/LAB18_ondevice_learning.ipynb)## Learning ObjectivesBy the end of this lab you should be able to:- Explain why deployed models on edge devices need continual adaptation- Apply transfer learning with frozen base layers and small trainable heads suitable for edge hardware- Implement incremental learning strategies that reduce catastrophic forgetting (replay buffers, regularisation such as EWC)- Design simple personalization workflows where users provide on-device examples and models adapt safely## Theory Summary### Why Models DriftWhen you deploy an ML model, the real world immediately starts to differ from your training data. Four types of distribution shift require on-device adaptation:1. **Data drift**: Input distribution changes (seasons, user behavior trends, sensor calibration)2. **Concept drift**: The relationship between inputs and outputs changes (new fraud patterns, evolving spam)3. **Personalization**: Each user has unique patterns the general model misses (typing style, pronunciation)4. **Environmental shift**: Sensors age, lighting changes, background noise variesWithout adaptation, deployed models degrade silently. Accuracy that was 95% on the test set becomes 70% within weeks in production.### Transfer Learning for Resource-Constrained DevicesFull retraining on edge devices is impractical (limited memory, slow CPUs, battery constraints). **Transfer learning** solves this by freezing the feature extraction layers and training only the final classifier head.**Why it works:**- Early layers learn general features (edges, textures, basic patterns)—these remain useful across tasks- Late layers learn task-specific patterns—only these need updating- Freezing 90%+ of parameters reduces trainable weights from millions to thousands**Memory savings example:**- Full MobileNetV2: 3.5M parameters trainable = 14 MB gradient buffers + 28 MB optimizer state = **42 MB**- Frozen base + head: 50K parameters trainable = 200 KB gradient buffers + 400 KB optimizer state = **600 KB** (70× less!)This fits on ESP32 (520 KB SRAM) with careful optimization.### Catastrophic Forgetting: The Hidden DangerNeural networks overwrite old knowledge when learning new patterns. **Catastrophic forgetting** occurs when on-device training on new data causes the model to forget previously learned tasks.**Classic example:**- Model trained on digits 0-9, achieves 95% accuracy- User provides 50 examples of a new gesture- After on-device training, new gesture accuracy: 98%- But original digit accuracy drops to 40%!**Two primary solutions:**1. **Experience Replay**: Maintain a small buffer (100-500 samples) of old data. When training on new data, mix in replay samples. This "reminds" the model of old tasks while learning new ones.2. **Elastic Weight Consolidation (EWC)**: Compute importance weights (Fisher information) for each parameter based on old tasks. During new training, penalize changes to important weights. No replay buffer needed—better for memory-constrained devices.## Key Concepts at a Glance::: {.callout-note icon=false}## Core Concepts- **Transfer Learning**: Freeze base layers, train only classifier head (99% parameter reduction)- **Catastrophic Forgetting**: Neural networks overwrite old knowledge when learning new tasks- **Replay Buffer**: Store 100-500 old examples; mix with new data during training to prevent forgetting- **Fisher Information**: Measures parameter importance; used by EWC to protect critical weights- **Personalization**: Adapt general model to user-specific data (50-100 examples sufficient)- **Version Control**: Save model checkpoints before/after adaptation with automatic rollback on regression- **Drift Detection**: Monitor prediction confidence or feature statistics to trigger retraining:::## Common Pitfalls::: {.callout-warning}## Mistakes to Avoid**Catastrophic Forgetting Without Replay**: The most insidious bug. Your model improves on new data but silently forgets old knowledge. Users report "the old stuff doesn't work anymore." **Prevention**: Always use a replay buffer mixing old and new data, or use EWC. Test on all classes after adaptation, not just new ones.**Not Checking Architecture Consistency**: Freezing layers incorrectly (e.g., `layer.trainable = False` after compiling) has no effect. Always freeze **before** calling `model.compile()`. Verify with `model.summary()` showing correct trainable parameter count.**Using Too Large Learning Rate**: Transfer learning needs 10-100× smaller learning rates than training from scratch. If learning rate is too high, the classifier head "forgets" its pre-trained initialization. Start with 0.001 or lower.**Ignoring Memory Constraints**: Training requires 3× model size in memory (weights + gradients + optimizer state). An 8 MB model needs 24 MB RAM for training. Always profile memory usage on target device before deploying on-device learning.**No Validation-Based Rollback**: On-device adaptation can make models worse if new data is corrupted or unrepresentative. Always keep a validation set, measure performance after adaptation, and rollback if accuracy drops >10%.**Training on Contaminated Data**: If replay buffer or new training data contains anomalies or mislabeled examples, the model learns incorrect patterns. Implement basic data quality checks (outlier detection, confidence thresholding) before training.:::## Quick Reference### Transfer Learning: Freeze Base Layers```pythonimport tensorflow as tf# Load pre-trained modelbase_model = tf.keras.applications.MobileNetV2( input_shape=(224, 224, 3), include_top=False, weights='imagenet')# Freeze all base layersbase_model.trainable =False# Add trainable classifier headmodel = tf.keras.Sequential([ base_model, tf.keras.layers.GlobalAveragePooling2D(), tf.keras.layers.Dense(128, activation='relu'), tf.keras.layers.Dense(num_classes, activation='softmax')])# Compile AFTER freezingmodel.compile( optimizer=tf.keras.optimizers.Adam(learning_rate=0.001), # Low LR! loss='sparse_categorical_crossentropy', metrics=['accuracy'])# Only head layers are trainable (99.4% reduction)print(f"Total params: {model.count_params():,}")print(f"Trainable: {sum(np.prod(v.shape) for v in model.trainable_variables):,}")```### Experience Replay Buffer```pythonclass ReplayBuffer:"""Prevents catastrophic forgetting with reservoir sampling"""def__init__(self, max_size=100):self.max_size = max_sizeself.buffer_x = []self.buffer_y = []self.count =0def add(self, x, y):"""Add examples using reservoir sampling"""for i inrange(len(x)):iflen(self.buffer_x) <self.max_size:self.buffer_x.append(x[i])self.buffer_y.append(y[i])else:# Replace random sample j = np.random.randint(0, len(self.buffer_x))self.buffer_x[j] = x[i]self.buffer_y[j] = y[i]self.count +=1def get_mixed_batch(self, new_x, new_y):"""Mix new data with replay buffer"""iflen(self.buffer_x) ==0:return new_x, new_y combined_x = np.concatenate([new_x, np.array(self.buffer_x)]) combined_y = np.concatenate([new_y, np.array(self.buffer_y)])# Shuffle indices = np.random.permutation(len(combined_x))return combined_x[indices], combined_y[indices]# Usagereplay = ReplayBuffer(max_size=200)replay.add(old_training_data_x, old_training_data_y)# On-device training with replaymixed_x, mixed_y = replay.get_mixed_batch(new_user_data_x, new_user_data_y)model.fit(mixed_x, mixed_y, epochs=5, batch_size=16)```### Model Version Control with Rollback```pythonimport jsonfrom datetime import datetimeclass ModelVersionManager:def__init__(self, model_dir="./models"):self.model_dir = model_dirself.versions = []def save_checkpoint(self, model, metrics, description=""):"""Save model version with metadata""" timestamp = datetime.now().strftime("%Y%m%d_%H%M%S") version_id =f"v_{timestamp}" path =f"{self.model_dir}/{version_id}" model.save_weights(f"{path}/weights.h5") metadata = {"id": version_id,"timestamp": timestamp,"description": description,"metrics": metrics }withopen(f"{path}/meta.json", "w") as f: json.dump(metadata, f)self.versions.append(version_id)return version_iddef rollback(self, model, steps=1):"""Revert to previous version"""iflen(self.versions) < steps +1:raiseValueError("Not enough versions to rollback") target =self.versions[-(steps+1)] model.load_weights(f"{self.model_dir}/{target}/weights.h5")return target# Usagevm = ModelVersionManager()# Before adaptationbaseline_acc = model.evaluate(val_x, val_y)[1]vm.save_checkpoint(model, {"accuracy": baseline_acc}, "Before adaptation")# Adapt on user datamodel.fit(user_x, user_y, epochs=10)# After adaptationadapted_acc = model.evaluate(val_x, val_y)[1]# Rollback if performance regressedif adapted_acc < baseline_acc -0.10: # 10% toleranceprint(f"Regression detected: {adapted_acc:.2%} < {baseline_acc:.2%}") vm.rollback(model, steps=1)print("Rolled back to previous version")else: vm.save_checkpoint(model, {"accuracy": adapted_acc}, "After adaptation")```### Drift Detection```pythondef detect_drift(baseline_mean, baseline_std, new_samples, threshold=2.5):"""Detect significant distribution shift using Z-score""" new_mean = np.mean(new_samples) z_score =abs(new_mean - baseline_mean) / baseline_stdif z_score > threshold:returnTrue, z_scorereturnFalse, z_score# Monitor input statisticsbaseline_mean = np.mean(training_data)baseline_std = np.std(training_data)# Check new data periodicallyrecent_data = collect_recent_samples(100)is_drifted, z = detect_drift(baseline_mean, baseline_std, recent_data)if is_drifted:print(f"Drift detected (z={z:.2f}), triggering retraining") trigger_on_device_adaptation()```### Memory Requirements| Component | FP32 Model | INT8 Model | Notes ||-----------|------------|------------|-------|| **Model Weights** | 4M params = 16 MB | 4M params = 4 MB | 4× reduction || **Gradient Buffers** | 16 MB | 4 MB | Match weight size || **Optimizer State** | 32 MB (Adam) | 8 MB | 2× weights (momentum + velocity) || **Batch Data** | batch × input size | batch × input size | Reduce batch for low memory || **Total Training** | ~64 MB | ~16 MB | 4× reduction via quantization |For ESP32 (520 KB RAM): Only train final layer (~50K params) in FP32 = **600 KB total** (feasible with careful optimization).---::: {.callout-tip}## Related Concepts in PDF Chapter 18- Section 18.2: Four types of distribution shift (data, concept, personalization, environmental)- Section 18.3: Transfer learning implementation with frozen base layers- Section 18.4: Experience replay buffer with reservoir sampling algorithm- Section 18.5: Elastic Weight Consolidation (EWC) for memory-constrained devices- Section 18.6: Model version control, rollback strategies, and A/B testing- Section 18.7: TFLite on-device training and MCU deployment constraints:::## Self-Assessment CheckpointsTest your understanding before proceeding to the exercises.::: {.callout-note collapse="true" title="Question 1: Calculate the memory required for training vs inference for a MobileNetV2 model with 3.5M parameters."}**Answer:** **Inference only**: Model weights = 3.5M params × 1 byte (INT8) = 3.5 MB + tensor arena (~10 MB) = **~14 MB total**. **Training (full model)**: Weights (3.5 MB) + Gradients (3.5 MB) + Optimizer state like Adam momentum (7 MB) = **14 MB**. Plus activations and batch data = ~30-40 MB total. **Training (frozen base, 50K trainable params)**: Only head layers need gradients/optimizer. Trainable weights (50K × 4 bytes float32 = 200 KB) + gradients (200 KB) + optimizer (400 KB) = **800 KB**. This 50× reduction makes on-device learning feasible on ESP32 (520 KB SRAM with careful optimization) or any Raspberry Pi.:::::: {.callout-note collapse="true" title="Question 2: Explain catastrophic forgetting with a concrete example and how replay buffers solve it."}**Answer:** **Example**: A gesture recognition model trained on 5 gestures (wave, point, thumbs-up, fist, open-palm) achieves 95% accuracy. User wants to add a new gesture "peace sign" and provides 50 examples. After on-device training on just the new gesture, the model achieves 98% on peace signs but drops to 30% on the original 5 gestures—it "forgot" them. **Why**: Neural networks overwrite weights when learning new patterns. The peace sign training adjusted weights throughout the network, destroying learned features for old gestures. **Replay buffer solution**: Maintain a buffer with 10-20 examples of EACH old gesture (100 samples total). During new training, mix 50 peace sign samples with 100 replay samples. The network relearns old patterns while learning new ones. Final accuracy: 96% on old gestures, 98% on new gesture. Cost: 100-sample buffer ~10-50 KB depending on input size.:::::: {.callout-note collapse="true" title="Question 3: Why must you freeze base layers BEFORE calling model.compile() in transfer learning?"}**Answer:** Setting `layer.trainable = False` after `model.compile()` has NO EFFECT. Keras builds the optimizer and allocates gradient buffers during compilation based on the current trainable state. If you freeze after compiling, the optimizer still maintains gradients and momentum for all layers, wasting memory and CPU. Correct order: (1) Load base model, (2) **Set base_model.trainable = False**, (3) Add classifier head, (4) **Call model.compile()**, (5) Verify with `model.summary()` showing correct trainable parameter count. Incorrect order leads to: out of memory errors (3× memory usage for all layers), slow training (computing unused gradients), and subtle bugs where freezing doesn't actually freeze.:::::: {.callout-note collapse="true" title="Question 4: Your on-device learning improves accuracy on new data from 85% to 92%, but original accuracy drops from 95% to 88%. Should you keep or rollback the update?"}**Answer:** **Rollback the update**. The overall performance decreased: weighted average assuming equal class importance: (92% + 88%) / 2 = 90% vs original 95%. The new model is worse globally despite improvement on new data. This happens when: (1) Catastrophic forgetting without replay buffer, (2) New training data is biased or mislabeled, (3) Learning rate too high destroying pre-trained features, (4) Too many training epochs on new data. **Best practice**: Always maintain validation sets for both old and new tasks. Only deploy if: (1) New task accuracy >= target (e.g., 90%), (2) Old task accuracy drops <5%, (3) Weighted average improves. Implement automatic rollback triggers in production systems.:::::: {.callout-note collapse="true" title="Question 5: When deploying on-device learning, why use learning_rate=0.001 instead of 0.01 for transfer learning?"}**Answer:** Transfer learning starts from a pre-trained model that already has good feature extractors. Using a high learning rate (0.01) causes large weight updates that **destroy** this valuable initialization, potentially making the model worse than random initialization. With lr=0.001 (10× smaller), updates are gentle, allowing the classifier head to adapt while preserving base features. Analogy: You're fine-tuning a precision instrument—small adjustments work better than hammering it. For training from scratch, lr=0.01 is fine because there's no good initialization to preserve. Rule of thumb: Transfer learning needs 10-100× smaller learning rate than training from scratch. Start with 0.001 or 0.0001, monitor validation loss, and adjust if needed.:::## Interactive NotebookThe notebook below contains runnable code for all Level 1 activities.{{< embed ../../notebooks/LAB18_ondevice_learning.ipynb >}}## Three-Tier Activities::: {.panel-tabset}### Level 1: NotebookEnvironment: local Jupyter or Colab, no hardware required.Suggested workflow:1. Work through the notebook to: - train a base model (e.g., MNIST) and freeze feature layers - simulate user-specific data distributions and perform on-device fine-tuning2. Implement and compare: - naive adaptation (no replay, no regularisation) - replay buffer–based incremental learning - EWC-style regularisation.3. Quantify: - accuracy on new user data - forgetting on original tasks - number of trainable parameters and approximate memory footprint.4. Reflect on which strategies are realistic for different device classes (MCU vs Raspberry Pi vs phone).### Level 2: SimulatorHere you move beyond pure simulation and exercise TensorFlow Lite on a host device (typically a Raspberry Pi, but a laptop can be used for initial experiments).1. Export a frozen feature extractor and small classifier head from Level 1 into TFLite format.2. On a Pi or similar edge node: - run inference using the TFLite interpreter - experiment with any available on-device training/fine-tuning APIs (where supported), or - simulate on-device training by running small fine-tuning jobs on the Pi with strict memory limits.3. Measure: - training/inference time per batch - memory usage and any practical limitations (e.g., batch size=1–4 only).4. Discuss which parts of the on-device learning pipeline are best kept on an edge gateway (Pi) vs on MCU-only devices.### Level 3: DeviceTrue MCU on-device backpropagation is often infeasible; at this level we focus on practical adaptation strategies for constrained devices.1. Choose an existing deployed model from earlier labs (e.g., KWS in LAB04/05 or EMG in LAB10).2. Design an adaptation strategy that fits MCU constraints, such as: - retraining only the final linear layer or threshold - adjusting decision thresholds based on user feedback - collecting features on-device and offloading training to a phone/Pi, then updating weights.3. Implement a simple user-feedback loop: - allow users to mark predictions as correct/incorrect - log a small buffer of examples and periodically update parameters (on-device or via an attached gateway).4. Document: - what is actually updated on-device (weights vs thresholds vs configuration) - how you avoid catastrophic forgetting or regressions (e.g., versioning and rollback).Connect this back to LAB17: think about when federated learning (server-coordinated updates) is more appropriate than pure local on-device learning, especially for very small MCUs.:::## Related Labs::: {.callout-tip}## Continual Learning- **LAB02: ML Foundations** - Training fundamentals before adaptation- **LAB17: Federated Learning** - Compare with distributed learning approaches:::::: {.callout-tip}## Edge Deployment- **LAB03: Quantization** - Optimize models for on-device training- **LAB05: Edge Deployment** - Deploy adaptive models to devices- **LAB11: Profiling** - Measure training performance on edge- **LAB15: Energy Optimization** - Energy-efficient on-device training:::## Try It Yourself: Executable Python ExamplesThe following code blocks are fully executable and demonstrate key on-device learning concepts. Each example is self-contained and can be run directly in this Quarto document.### Example 1: Transfer Learning DemonstrationThis example demonstrates how to freeze base layers and train only a small classification head, dramatically reducing memory requirements for on-device learning.```{python}import numpy as npimport matplotlib.pyplot as pltnp.random.seed(42)# Simulate a pre-trained feature extractor (frozen base model)class FeatureExtractor:"""Simulates frozen base layers (e.g., MobileNetV2)"""def__init__(self, input_dim=784, feature_dim=128):# Pre-trained weights (frozen, not updated)self.weights = np.random.randn(input_dim, feature_dim) *0.01self.frozen =Truedef extract(self, x):"""Extract features (no gradient computation needed)"""return np.tanh(x @self.weights)# Trainable classification headclass ClassifierHead:"""Small trainable layer on top of frozen features"""def__init__(self, feature_dim=128, num_classes=3):# Randomly initialized trainable weightsself.weights = np.random.randn(feature_dim, num_classes) *0.01self.bias = np.zeros(num_classes)def forward(self, features):"""Forward pass through classifier""" logits = features @self.weights +self.biasreturnself.softmax(logits)def softmax(self, x): exp_x = np.exp(x - np.max(x, axis=1, keepdims=True))return exp_x / np.sum(exp_x, axis=1, keepdims=True)def train_step(self, features, labels, learning_rate=0.01):"""Single gradient descent step (only updates head weights)"""# Forward pass probs =self.forward(features)# Cross-entropy loss n = features.shape[0] loss =-np.mean(np.log(probs[range(n), labels] +1e-10))# Backward pass (gradients only for head) grad_logits = probs.copy() grad_logits[range(n), labels] -=1 grad_logits /= n# Update weightsself.weights -= learning_rate * (features.T @ grad_logits)self.bias -= learning_rate * np.sum(grad_logits, axis=0)return loss# Generate synthetic data (simulating new user-specific examples)def generate_data(num_samples=100, input_dim=784):"""Simulate user-specific training data""" x = np.random.randn(num_samples, input_dim) y = np.random.randint(0, 3, num_samples) # 3 classesreturn x, y# Memory calculationdef calculate_memory(base_params, head_params, dtype_bytes=4):"""Calculate memory requirements for training"""# Inference: just model weights inference_mb = (base_params + head_params) * dtype_bytes /1024**2# Training full model: weights + gradients + optimizer state (2x for Adam) full_training_mb = (base_params + head_params) * dtype_bytes *4/1024**2# Training only head: base weights (inference) + head training head_training_mb = base_params * dtype_bytes /1024**2+ head_params * dtype_bytes *4/1024**2return inference_mb, full_training_mb, head_training_mb# Simulationprint("Transfer Learning: Frozen Base + Trainable Head")print("="*60)# Model configurationinput_dim =784# e.g., 28x28 imagefeature_dim =128num_classes =3base_params = input_dim * feature_dim # 100,352 parametershead_params = feature_dim * num_classes + num_classes # 387 parametersprint(f"\nModel Architecture:")print(f" Base (frozen): {base_params:,} parameters")print(f" Head (trainable): {head_params:,} parameters")print(f" Reduction: {base_params/head_params:.1f}x fewer trainable params")# Memory analysisinf_mem, full_mem, head_mem = calculate_memory(base_params, head_params)print(f"\nMemory Requirements (FP32):")print(f" Inference only: {inf_mem:.2f} MB")print(f" Full training: {full_mem:.2f} MB")print(f" Head-only training: {head_mem:.2f} MB")print(f" Memory reduction: {full_mem/head_mem:.1f}x less")# Training simulationextractor = FeatureExtractor(input_dim, feature_dim)classifier = ClassifierHead(feature_dim, num_classes)x_train, y_train = generate_data(100, input_dim)x_test, y_test = generate_data(30, input_dim)# Extract features (one-time, frozen)train_features = extractor.extract(x_train)test_features = extractor.extract(x_test)# Train only the headepochs =20train_losses = []test_accuracies = []print(f"\nTraining classifier head for {epochs} epochs:")for epoch inrange(epochs):# Train loss = classifier.train_step(train_features, y_train, learning_rate=0.1) train_losses.append(loss)# Evaluate test_probs = classifier.forward(test_features) test_preds = np.argmax(test_probs, axis=1) accuracy = np.mean(test_preds == y_test) test_accuracies.append(accuracy)if epoch %5==0:print(f" Epoch {epoch+1}: Loss={loss:.4f}, Test Acc={accuracy:.2%}")# Visualizationfig, axes = plt.subplots(1, 2, figsize=(12, 4))# Loss curveaxes[0].plot(train_losses, 'b-', linewidth=2)axes[0].set_xlabel('Epoch')axes[0].set_ylabel('Training Loss')axes[0].set_title('Training Loss (Head Only)')axes[0].grid(True, alpha=0.3)# Accuracy curveaxes[1].plot(test_accuracies, 'g-', linewidth=2)axes[1].set_xlabel('Epoch')axes[1].set_ylabel('Test Accuracy')axes[1].set_title('Test Accuracy')axes[1].set_ylim(0, 1)axes[1].grid(True, alpha=0.3)plt.tight_layout()plt.show()print(f"\nFinal Test Accuracy: {test_accuracies[-1]:.2%}")print(f"\nKey Insight: By freezing the base model, we reduced trainable parameters")print(f"from {base_params+head_params:,} to {head_params:,} ({head_params/(base_params+head_params)*100:.2f}%),")print(f"making on-device training feasible on resource-constrained devices.")```### Example 2: Replay Buffer ImplementationThis example shows how a replay buffer prevents catastrophic forgetting by maintaining a diverse set of old examples.```{python}import numpy as npimport matplotlib.pyplot as pltnp.random.seed(42)class ReplayBuffer:"""Prevents catastrophic forgetting using reservoir sampling"""def__init__(self, max_size=100):self.max_size = max_sizeself.buffer_x = []self.buffer_y = []self.count =0def add(self, x, y):"""Add samples using reservoir sampling for diversity"""for i inrange(len(x)):iflen(self.buffer_x) <self.max_size:# Buffer not full, just appendself.buffer_x.append(x[i])self.buffer_y.append(y[i])else:# Buffer full, randomly replace j = np.random.randint(0, self.count +1)if j <self.max_size:self.buffer_x[j] = x[i]self.buffer_y[j] = y[i]self.count +=1def get_samples(self, n=None):"""Get samples from buffer"""if n isNoneor n >=len(self.buffer_x):return np.array(self.buffer_x), np.array(self.buffer_y) indices = np.random.choice(len(self.buffer_x), n, replace=False)return np.array([self.buffer_x[i] for i in indices]), np.array([self.buffer_y[i] for i in indices])def get_mixed_batch(self, new_x, new_y, replay_ratio=0.5):"""Mix new data with replay samples"""iflen(self.buffer_x) ==0:return new_x, new_y# Determine split n_new =len(new_x) n_replay =int(n_new * replay_ratio / (1- replay_ratio)) replay_x, replay_y =self.get_samples(n_replay)# Combine and shuffle combined_x = np.vstack([new_x, replay_x]) combined_y = np.concatenate([new_y, replay_y]) indices = np.random.permutation(len(combined_x))return combined_x[indices], combined_y[indices]# Simple linear classifier for demonstrationclass SimpleClassifier:def__init__(self, input_dim=10, num_classes=5):self.weights = np.random.randn(input_dim, num_classes) *0.01self.bias = np.zeros(num_classes)def forward(self, x): logits = x @self.weights +self.bias exp_logits = np.exp(logits - np.max(logits, axis=1, keepdims=True))return exp_logits / np.sum(exp_logits, axis=1, keepdims=True)def train(self, x, y, epochs=5, lr=0.01):for _ inrange(epochs): probs =self.forward(x) n =len(x) grad = probs.copy() grad[range(n), y] -=1 grad /= nself.weights -= lr * (x.T @ grad)self.bias -= lr * np.sum(grad, axis=0)def evaluate(self, x, y): preds = np.argmax(self.forward(x), axis=1)return np.mean(preds == y)# Experiment: Compare training with and without replay bufferprint("Catastrophic Forgetting: Replay Buffer Demonstration")print("="*60)input_dim =10num_classes =5# Generate initial training data (classes 0, 1, 2)x_old = np.random.randn(200, input_dim)y_old = np.random.choice([0, 1, 2], 200)# Generate new training data (classes 3, 4)x_new = np.random.randn(100, input_dim) +2# Different distributiony_new = np.random.choice([3, 4], 100)# Test sets for all classesx_test_old = np.random.randn(100, input_dim)y_test_old = np.random.choice([0, 1, 2], 100)x_test_new = np.random.randn(50, input_dim) +2y_test_new = np.random.choice([3, 4], 50)# Scenario 1: WITHOUT replay buffer (catastrophic forgetting)print("\nScenario 1: Training WITHOUT Replay Buffer")model_no_replay = SimpleClassifier(input_dim, num_classes)model_no_replay.train(x_old, y_old, epochs=10)acc_old_before = model_no_replay.evaluate(x_test_old, y_test_old)print(f" Initial accuracy on old classes: {acc_old_before:.2%}")# Train on new classes onlymodel_no_replay.train(x_new, y_new, epochs=10)acc_old_after = model_no_replay.evaluate(x_test_old, y_test_old)acc_new_after = model_no_replay.evaluate(x_test_new, y_test_new)print(f" After new training:")print(f" Old classes accuracy: {acc_old_after:.2%} (dropped {(acc_old_before-acc_old_after)*100:.1f}%)")print(f" New classes accuracy: {acc_new_after:.2%}")# Scenario 2: WITH replay bufferprint("\nScenario 2: Training WITH Replay Buffer")model_with_replay = SimpleClassifier(input_dim, num_classes)replay = ReplayBuffer(max_size=100)# Initial training and populate buffermodel_with_replay.train(x_old, y_old, epochs=10)replay.add(x_old, y_old)acc_old_before2 = model_with_replay.evaluate(x_test_old, y_test_old)print(f" Initial accuracy on old classes: {acc_old_before2:.2%}")print(f" Replay buffer size: {len(replay.buffer_x)} samples")# Train on new classes WITH replaymixed_x, mixed_y = replay.get_mixed_batch(x_new, y_new, replay_ratio=0.5)print(f" Training batch: {len(x_new)} new + {len(mixed_x)-len(x_new)} replay = {len(mixed_x)} total")model_with_replay.train(mixed_x, mixed_y, epochs=10)acc_old_after2 = model_with_replay.evaluate(x_test_old, y_test_old)acc_new_after2 = model_with_replay.evaluate(x_test_new, y_test_new)print(f" After new training:")print(f" Old classes accuracy: {acc_old_after2:.2%} (dropped {(acc_old_before2-acc_old_after2)*100:.1f}%)")print(f" New classes accuracy: {acc_new_after2:.2%}")# Visualizationfig, axes = plt.subplots(1, 2, figsize=(12, 5))# Compare old class accuracyscenarios = ['Without\nReplay', 'With\nReplay']before_accs = [acc_old_before, acc_old_before2]after_accs = [acc_old_after, acc_old_after2]x_pos = np.arange(len(scenarios))axes[0].bar(x_pos -0.2, before_accs, 0.4, label='Before New Training', color='skyblue')axes[0].bar(x_pos +0.2, after_accs, 0.4, label='After New Training', color='coral')axes[0].set_ylabel('Accuracy on Old Classes')axes[0].set_title('Catastrophic Forgetting Prevention')axes[0].set_xticks(x_pos)axes[0].set_xticklabels(scenarios)axes[0].legend()axes[0].set_ylim(0, 1)axes[0].grid(True, alpha=0.3, axis='y')# Overall comparisoncategories = ['Old Classes', 'New Classes']no_replay = [acc_old_after, acc_new_after]with_replay = [acc_old_after2, acc_new_after2]x_pos = np.arange(len(categories))axes[1].bar(x_pos -0.2, no_replay, 0.4, label='Without Replay', color='coral')axes[1].bar(x_pos +0.2, with_replay, 0.4, label='With Replay', color='skyblue')axes[1].set_ylabel('Accuracy')axes[1].set_title('Final Performance Comparison')axes[1].set_xticks(x_pos)axes[1].set_xticklabels(categories)axes[1].legend()axes[1].set_ylim(0, 1)axes[1].grid(True, alpha=0.3, axis='y')plt.tight_layout()plt.show()print("\nKey Insight: Replay buffer prevents catastrophic forgetting by maintaining")print("a diverse set of old examples. Memory cost: 100 samples × 10 features × 4 bytes = 4 KB")```### Example 3: Model Versioning SimulationThis example demonstrates automatic model versioning with rollback capability to prevent performance regressions.```{python}import numpy as npimport matplotlib.pyplot as pltfrom datetime import datetimenp.random.seed(42)class ModelVersionManager:"""Manages model versions with automatic rollback"""def__init__(self):self.versions = []self.current_version =0def save_checkpoint(self, model_state, metrics, description=""):"""Save model version with metadata""" version = {'id': len(self.versions),'timestamp': datetime.now().strftime("%H:%M:%S"),'state': model_state.copy(),'metrics': metrics.copy(),'description': description }self.versions.append(version)self.current_version =len(self.versions) -1return version['id']def rollback(self, steps=1):"""Revert to previous version"""iflen(self.versions) < steps +1:raiseValueError(f"Cannot rollback {steps} steps, only {len(self.versions)} versions")self.current_version =len(self.versions) - steps -1returnself.versions[self.current_version]def get_current(self):returnself.versions[self.current_version]def compare_versions(self, v1_id, v2_id):"""Compare two versions""" v1 =self.versions[v1_id] v2 =self.versions[v2_id]return {'accuracy_diff': v2['metrics']['accuracy'] - v1['metrics']['accuracy'],'v1': v1,'v2': v2 }# Simulate model adaptation workflowprint("Model Versioning with Automatic Rollback")print("="*60)# Simple model state (just accuracy for demo)version_manager = ModelVersionManager()# Baseline modelbaseline_metrics = {'accuracy': 0.92, 'loss': 0.25}version_manager.save_checkpoint( model_state={'weights': np.random.randn(5)}, metrics=baseline_metrics, description="Baseline model")print(f"[{version_manager.get_current()['timestamp']}] Saved v{version_manager.current_version}: {baseline_metrics['description']}")print(f" Accuracy: {baseline_metrics['accuracy']:.2%}")# Simulate 5 adaptation attemptsadaptation_scenarios = [ {'accuracy': 0.94, 'loss': 0.20, 'description': 'Good adaptation +2%'}, {'accuracy': 0.88, 'loss': 0.35, 'description': 'Bad adaptation -4% (ROLLBACK)'}, {'accuracy': 0.95, 'loss': 0.18, 'description': 'Excellent adaptation +3%'}, {'accuracy': 0.93, 'loss': 0.22, 'description': 'Slight degradation -2% (ROLLBACK)'}, {'accuracy': 0.96, 'loss': 0.16, 'description': 'Best adaptation +3%'},]rollback_threshold =0.10# Rollback if accuracy drops > 10%history = []for i, scenario inenumerate(adaptation_scenarios, 1):print(f"\n[Adaptation {i}]")# Save new version version_manager.save_checkpoint( model_state={'weights': np.random.randn(5)}, metrics={'accuracy': scenario['accuracy'], 'loss': scenario['loss']}, description=scenario['description'] ) current = version_manager.get_current() previous = version_manager.versions[-2]print(f" New accuracy: {current['metrics']['accuracy']:.2%}")print(f" Previous: {previous['metrics']['accuracy']:.2%}")# Check if we should rollback accuracy_change = current['metrics']['accuracy'] - previous['metrics']['accuracy']if accuracy_change <-rollback_threshold:print(f" REGRESSION DETECTED: {accuracy_change:.2%}")print(f" Rolling back to v{previous['id']}...") version_manager.rollback(steps=1)print(f" Restored accuracy: {version_manager.get_current()['metrics']['accuracy']:.2%}") history.append(previous['metrics']['accuracy'])else:print(f" Change: {accuracy_change:+.2%} - ACCEPTED") history.append(current['metrics']['accuracy'])# Visualizationfig, axes = plt.subplots(1, 2, figsize=(14, 5))# Version historyversions_plot = [v['metrics']['accuracy'] for v in version_manager.versions]timestamps = [v['timestamp'] for v in version_manager.versions]axes[0].plot(range(len(versions_plot)), versions_plot, 'o-', linewidth=2, markersize=8)axes[0].axhline(y=baseline_metrics['accuracy'], color='red', linestyle='--', alpha=0.5, label='Baseline')axes[0].axhline(y=baseline_metrics['accuracy'] - rollback_threshold, color='orange', linestyle=':', alpha=0.5, label='Rollback Threshold')axes[0].set_xlabel('Version ID')axes[0].set_ylabel('Accuracy')axes[0].set_title('Model Version History (All Saved Versions)')axes[0].legend()axes[0].grid(True, alpha=0.3)axes[0].set_ylim(0.8, 1.0)# Actual deployed history (after rollbacks)axes[1].plot(range(len(history)), history, 's-', linewidth=2, markersize=8, color='green')axes[1].axhline(y=baseline_metrics['accuracy'], color='red', linestyle='--', alpha=0.5, label='Baseline')axes[1].set_xlabel('Adaptation Attempt')axes[1].set_ylabel('Accuracy')axes[1].set_title('Deployed Model History (After Rollbacks)')axes[1].legend()axes[1].grid(True, alpha=0.3)axes[1].set_ylim(0.8, 1.0)plt.tight_layout()plt.show()# Summaryprint("\n"+"="*60)print("Version Management Summary")print("="*60)print(f"Total versions saved: {len(version_manager.versions)}")print(f"Rollbacks performed: {len(version_manager.versions) -len(history) -1}")print(f"Final accuracy: {history[-1]:.2%}")print(f"Improvement over baseline: {(history[-1] - baseline_metrics['accuracy']):.2%}")print("\nKey Insight: Version control with automatic rollback prevents deploying")print("models that perform worse than previous versions, ensuring production reliability.")```### Example 4: Catastrophic Forgetting VisualizationThis example visualizes how catastrophic forgetting affects different classes over time during sequential learning.```{python}import numpy as npimport matplotlib.pyplot as pltnp.random.seed(42)def simulate_sequential_learning(num_tasks=4, samples_per_task=50, use_replay=False):"""Simulate learning multiple tasks sequentially""" accuracies = {task: [] for task inrange(num_tasks)}for current_task inrange(num_tasks):# After each task, test on all previous tasksfor test_task inrange(num_tasks):if test_task < current_task:# Old task - test forgettingif use_replay:# With replay buffer, maintain ~80-90% accuracy base_acc =0.85 decay =0.05* (current_task - test_task) acc = base_acc - decay + np.random.normal(0, 0.02)else:# Without replay, severe forgetting base_acc =0.90 decay =0.20* (current_task - test_task) acc = base_acc - decay + np.random.normal(0, 0.03) accuracies[test_task].append(max(0.1, acc))elif test_task == current_task:# Current task - good accuracy acc =0.90+ np.random.normal(0, 0.02) accuracies[test_task].append(min(1.0, acc))else:# Future task - not trained yet acc =0.10+ np.random.normal(0, 0.02) # Random guessing accuracies[test_task].append(max(0, acc))return accuracies# Run both scenariosprint("Catastrophic Forgetting: Multi-Task Learning Visualization")print("="*60)num_tasks =4task_names = [f"Task {i+1}"for i inrange(num_tasks)]acc_no_replay = simulate_sequential_learning(num_tasks, use_replay=False)acc_with_replay = simulate_sequential_learning(num_tasks, use_replay=True)# Visualizationfig, axes = plt.subplots(2, 2, figsize=(14, 10))# Without replay bufferax = axes[0, 0]for task inrange(num_tasks): ax.plot(range(num_tasks), acc_no_replay[task], marker='o', label=task_names[task], linewidth=2, markersize=8)ax.set_xlabel('Training Step')ax.set_ylabel('Accuracy')ax.set_title('WITHOUT Replay Buffer\n(Catastrophic Forgetting)', fontsize=13, fontweight='bold')ax.legend()ax.set_xticks(range(num_tasks))ax.set_xticklabels([f'After\n{name}'for name in task_names])ax.grid(True, alpha=0.3)ax.set_ylim(0, 1)# With replay bufferax = axes[0, 1]for task inrange(num_tasks): ax.plot(range(num_tasks), acc_with_replay[task], marker='s', label=task_names[task], linewidth=2, markersize=8)ax.set_xlabel('Training Step')ax.set_ylabel('Accuracy')ax.set_title('WITH Replay Buffer\n(Forgetting Prevented)', fontsize=13, fontweight='bold')ax.legend()ax.set_xticks(range(num_tasks))ax.set_xticklabels([f'After\n{name}'for name in task_names])ax.grid(True, alpha=0.3)ax.set_ylim(0, 1)# Heatmap: Without replayax = axes[1, 0]matrix_no_replay = np.array([acc_no_replay[task] for task inrange(num_tasks)])im = ax.imshow(matrix_no_replay, cmap='RdYlGn', vmin=0, vmax=1, aspect='auto')ax.set_xlabel('Training Step')ax.set_ylabel('Task')ax.set_title('Accuracy Heatmap: WITHOUT Replay', fontweight='bold')ax.set_xticks(range(num_tasks))ax.set_xticklabels([f'After\n{name}'for name in task_names])ax.set_yticks(range(num_tasks))ax.set_yticklabels(task_names)# Add text annotationsfor i inrange(num_tasks):for j inrange(num_tasks): text = ax.text(j, i, f'{matrix_no_replay[i, j]:.2f}', ha="center", va="center", color="black", fontsize=10)plt.colorbar(im, ax=ax)# Heatmap: With replayax = axes[1, 1]matrix_with_replay = np.array([acc_with_replay[task] for task inrange(num_tasks)])im = ax.imshow(matrix_with_replay, cmap='RdYlGn', vmin=0, vmax=1, aspect='auto')ax.set_xlabel('Training Step')ax.set_ylabel('Task')ax.set_title('Accuracy Heatmap: WITH Replay', fontweight='bold')ax.set_xticks(range(num_tasks))ax.set_xticklabels([f'After\n{name}'for name in task_names])ax.set_yticks(range(num_tasks))ax.set_yticklabels(task_names)# Add text annotationsfor i inrange(num_tasks):for j inrange(num_tasks): text = ax.text(j, i, f'{matrix_with_replay[i, j]:.2f}', ha="center", va="center", color="black", fontsize=10)plt.colorbar(im, ax=ax)plt.tight_layout()plt.show()# Calculate forgetting metricsprint("\nForgetting Analysis:")print("-"*60)for scenario_name, accuracies in [("Without Replay", acc_no_replay), ("With Replay", acc_with_replay)]:print(f"\n{scenario_name}:")# Average accuracy on old tasks after final training final_step = num_tasks -1 old_task_accs = [accuracies[task][final_step] for task inrange(num_tasks -1)] avg_old = np.mean(old_task_accs) if old_task_accs else0# Current task accuracy current_acc = accuracies[num_tasks -1][final_step]print(f" Current task (Task {num_tasks}) accuracy: {current_acc:.2%}")print(f" Average old task accuracy: {avg_old:.2%}")print(f" Overall average: {(current_acc + avg_old * (num_tasks-1)) / num_tasks:.2%}")# Calculate forgetting (peak accuracy - final accuracy for each old task) forgetting_scores = []for task inrange(num_tasks -1): peak =max(accuracies[task][:task+2]) # Best accuracy when learning/just after final = accuracies[task][final_step] forgetting = peak - final forgetting_scores.append(forgetting)print(f" Task {task+1} forgetting: {forgetting:.2%} (peak: {peak:.2%} → final: {final:.2%})") avg_forgetting = np.mean(forgetting_scores) if forgetting_scores else0print(f" Average forgetting: {avg_forgetting:.2%}")print("\n"+"="*60)print("Key Insight: Without replay buffer, accuracy on old tasks drops dramatically")print("as new tasks are learned (diagonal pattern in heatmap). Replay buffer maintains")print("performance on all tasks by mixing old and new data during training.")```## Related Resources- [Hardware Guide](../resources/hardware.qmd) - Equipment needed for Level 3- [Troubleshooting](../resources/troubleshooting.qmd) - Common issues and solutions